

Unmanned vehicle navigation and positioning precision correction method based on GNSS and visual odometry fusion
A visual odometry and positioning accuracy technology, applied in the field of unmanned vehicle integrated navigation, can solve the problems of high price, low accuracy and poor reliability of the integrated navigation system, and achieve the optimization of positioning accuracy, improve positioning accuracy, and suppress drift errors. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be described in detail below according to the accompanying drawings, which is a preferred embodiment among various implementations of the present invention.
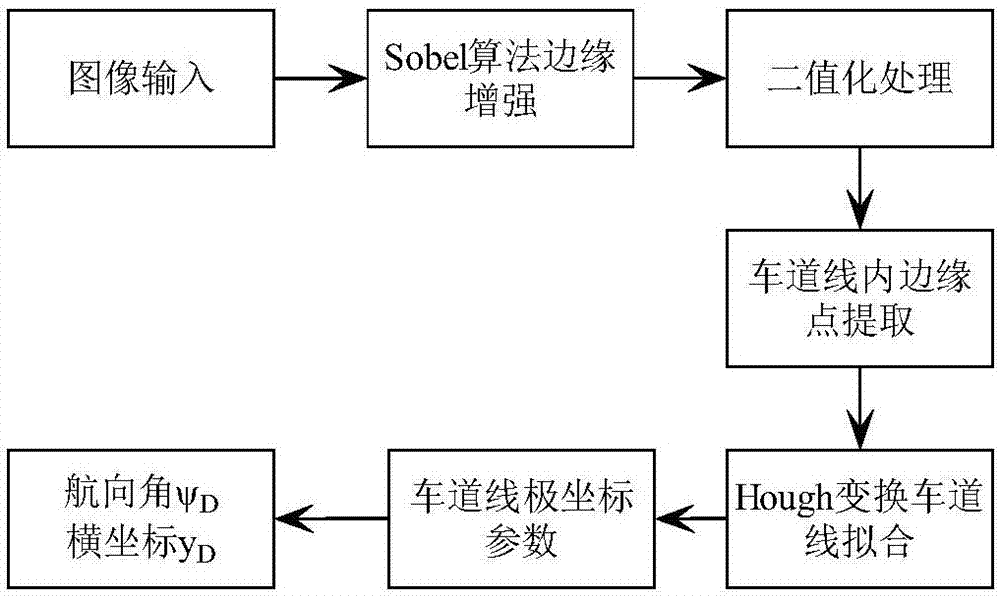
[0032] (1) Lane line detection based on monocular vision
[0033] Read a frame of image and process the image line by line. For each line in the image, the Sobel algorithm sensitive to the horizontal direction is firstly used to enhance the edge. Then the line information is processed and binarized, and the inner edge extraction algorithm of the lane line is used for the binarized data to extract the inner edge points of the lane line, and the hough transform is used to fit the lane line to obtain the polar coordinate parameters of the lane line (polar coordinate radius and angle). Extract the heading angle ψ of the vehicle in the road coordinate system D and lateral position y D . The lane line detection process is as follows: figure 1 shown.
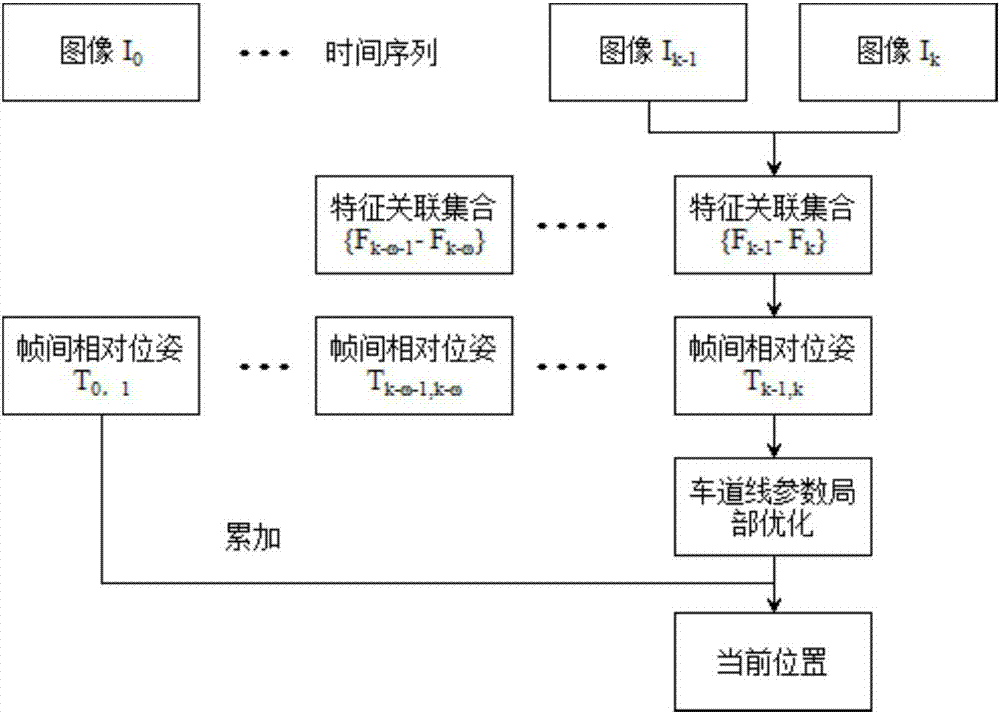
[0034] (2) Optimization of position...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More