

Position control method of single-joint flexible manipulator based on state feedback
A flexible robotic arm and state feedback technology, applied in the field of robotics, can solve problems such as increased difficulty in control algorithm design
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0070] The present invention will be further described below according to the accompanying drawings.
[0071] The method of the present invention is based on state feedback and a single-joint flexible mechanical arm, and the inventive method includes the following steps:
[0072] S001. Modeling of single-joint flexible manipulator:
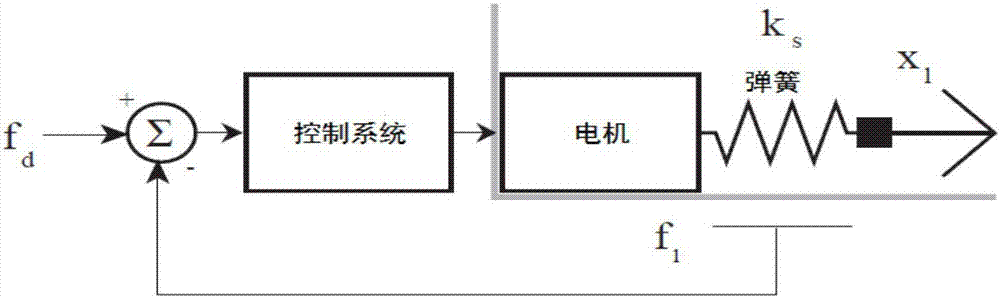
[0073] The driving method of connecting the elastic medium in series between the driving end and the load end is called a series elastic actuator (Series Elastic Actuator), and its overall structure is as follows: figure 1 shown. SEA uses the compression of the elastic element as the feedback information of the load torque through Hooke's law, transforms the torque control into position control, and reduces the impact of load changes, motor inertia and friction on the system. The design mode adopted by the experimental platform of series elastic drive manipulator is "motor + reducer + torsion spring + load", which is designed to make it work und...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More