

Agricultural machinery automatic navigation control method based on double-antenna GNSS (Global Navigation Satellite System) and preview tracking model
A technology of automatic navigation and control method, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problems of complex and uncertain system of agricultural machinery navigation control system, etc., to reduce costs, improve adaptability, improve fast effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
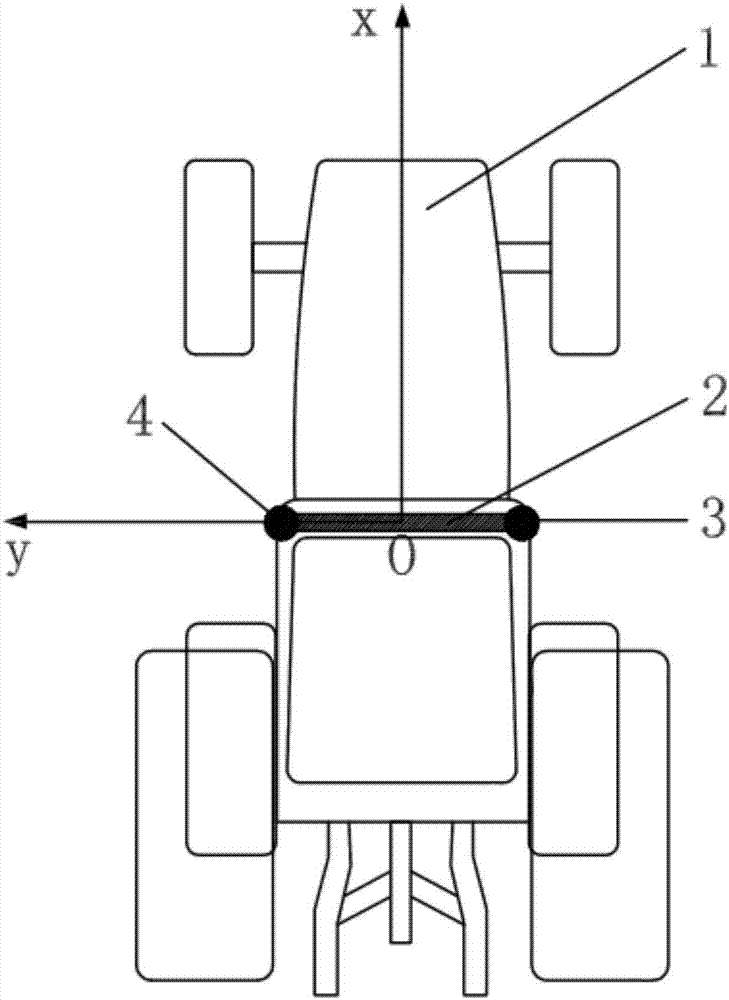
[0045] The agricultural machine used in this example is Lovol M904-D wheeled tractor, and its navigation system mainly includes: reference station and data link, Sinan K528 dual-antenna GNSS board, dual-antenna fixed bracket, embedded development board and display terminal; Such as figure 2 Shown is a schematic diagram of GNSS antenna installation according to an embodiment of the present invention. A vehicle body coordinate system is established for the wheeled tractor 1. The vehicle body coordinate system Oxy is defined as taking the position of the center of mass of the vehicle body as the origin O, the horizontal axis x points to the forward direction of the vehicle body, and the vertical axis y is perpendicular to the horizontal axis and points to the left side of the forward direction of the car body. The double-antenna fixing bracket 2 is a rectangular steel pipe with a length of not less than 1.3m, which is installed on the top of the tractor cab directly above the ce...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More