

Positioning system for assisting in spine minimally invasive surgery
A minimally invasive surgery and positioning system technology, applied in the field of surgical instruments, can solve the problems of difficult surgery, low precision of spinal drilling, deviation from the set path, etc., and achieve the effects of shortening operation time, reducing radiation, and precise positioning
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0034] Specific embodiments of the present invention will be described below in conjunction with the accompanying drawings.
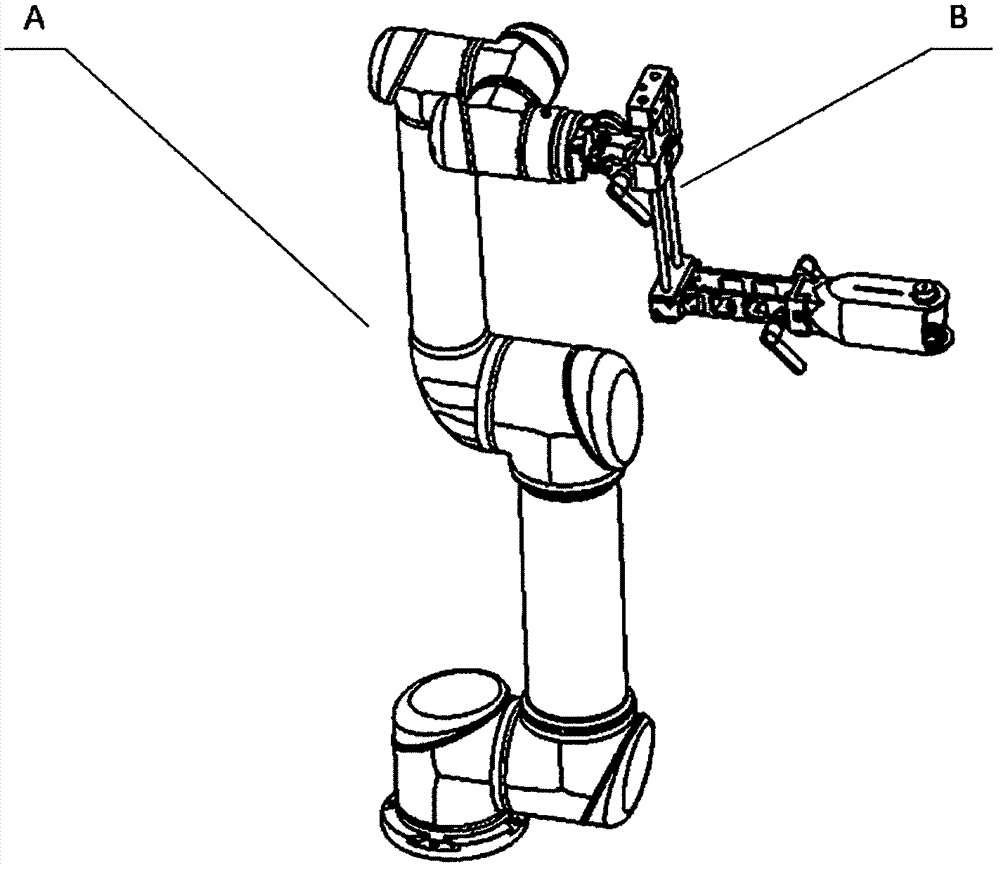
[0035] refer to Figure 1 to Figure 5 , an embodiment of the path positioning system for auxiliary spinal minimally invasive surgery of the present invention, including a mechanical arm and a path locator.
[0036] The mechanical arm should have more than six degrees of freedom, and the six-degree-of-freedom series mechanical arm produced by UniversalRobots in Denmark is selected; the mechanical arm can be installed on a trolley.
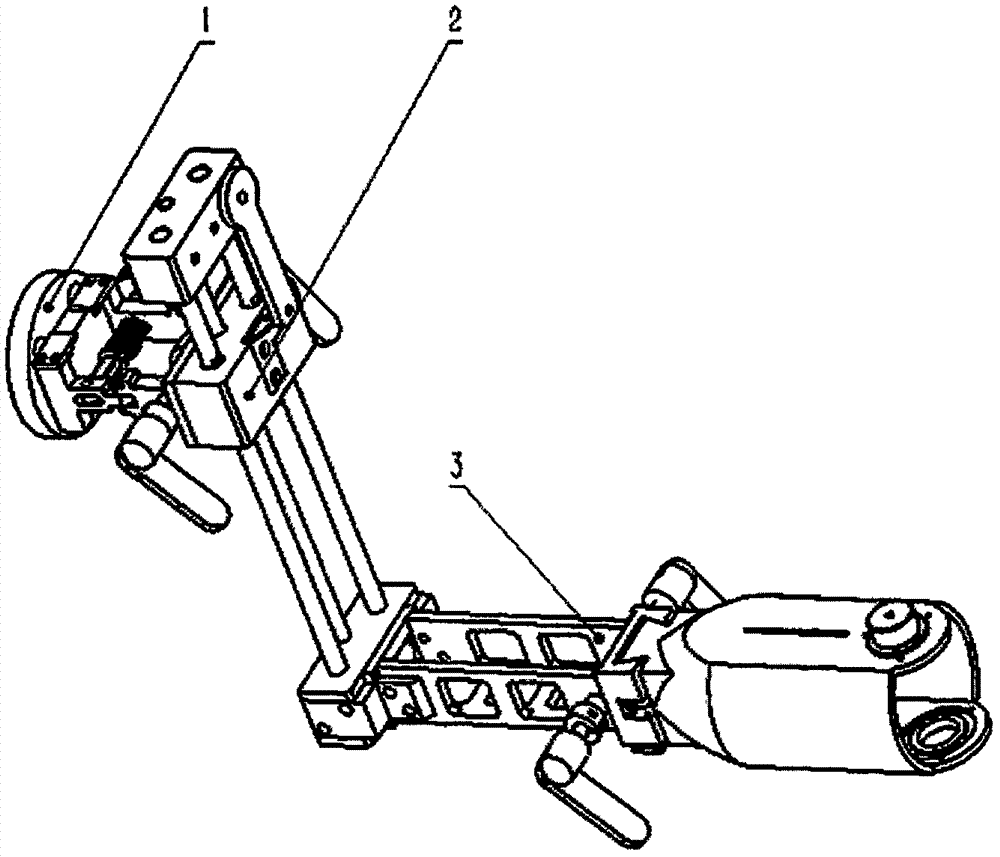
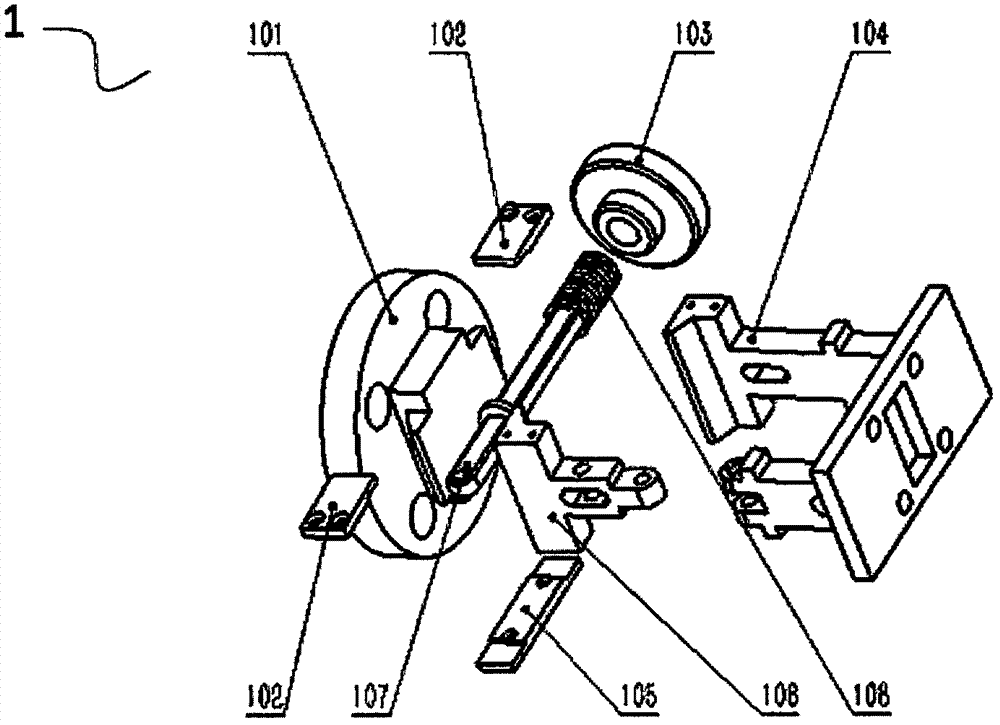
[0037] The path locator includes a flange short locking assembly, a lifting sliding assembly, and a double-ring positioning assembly. The path locator is fixed at the end of the mechanical arm through a short flange locking component; the lifting sliding component is connected with the short flange locking component by clamping and locking the main body; the double-ring positioning component is connected with the lifting tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More