

An autonomous crawling drilling and riveting system and its operating method
An operation method and drilling riveting technology, which are applied in portable drilling rigs, transportation and packaging, drilling/drilling equipment, etc., can solve the problems of low joint stiffness and low absolute positioning accuracy, and achieve simplified tooling, stable assembly quality, and flexibility. Good results
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0074] In order to clarify the technical scheme and technical purpose of the present invention, the present invention will be further introduced below in conjunction with the accompanying drawings and specific embodiments (taking the butt joint assembly drill riveting of the middle section of the fuselage of a large aircraft as an example).
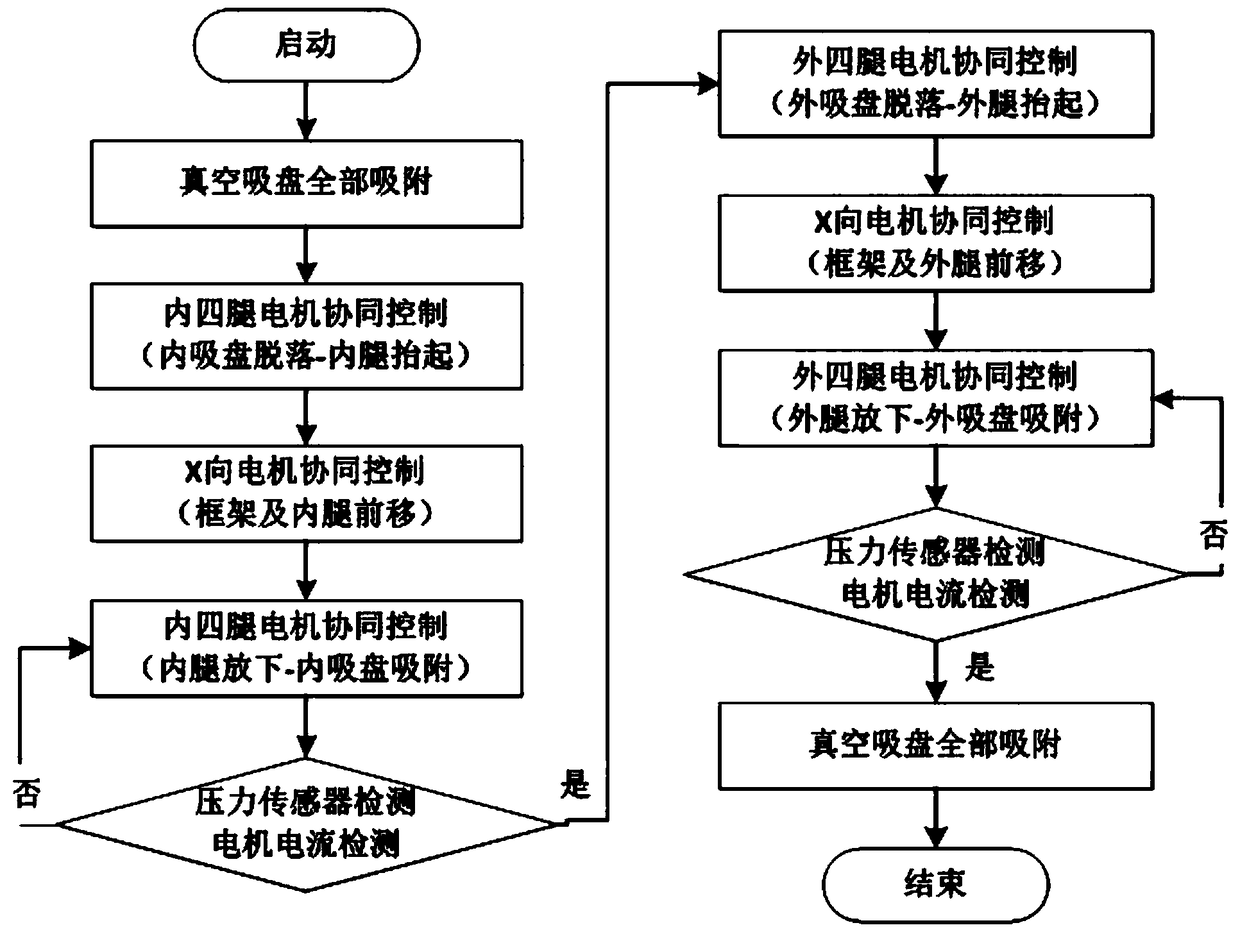
[0075] Specific implementation of robot adsorption walking technology
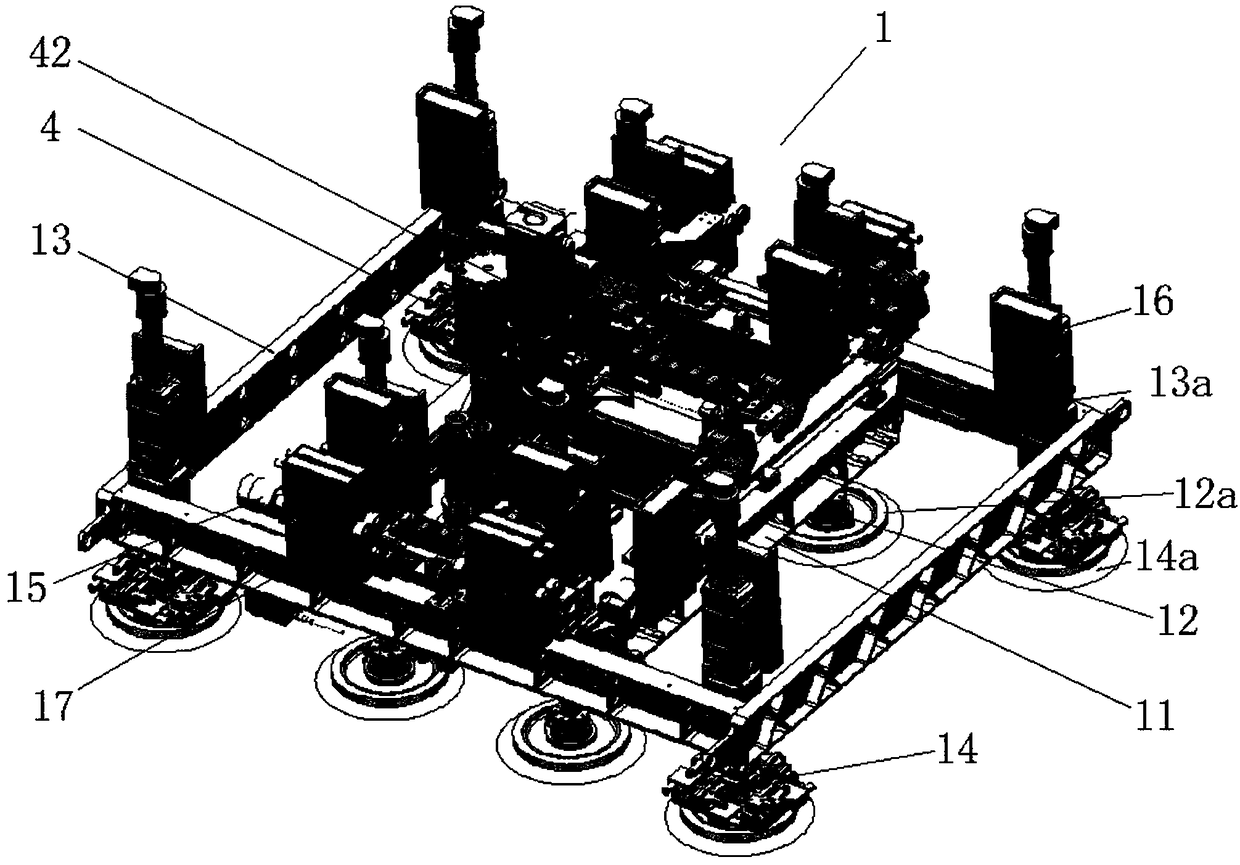
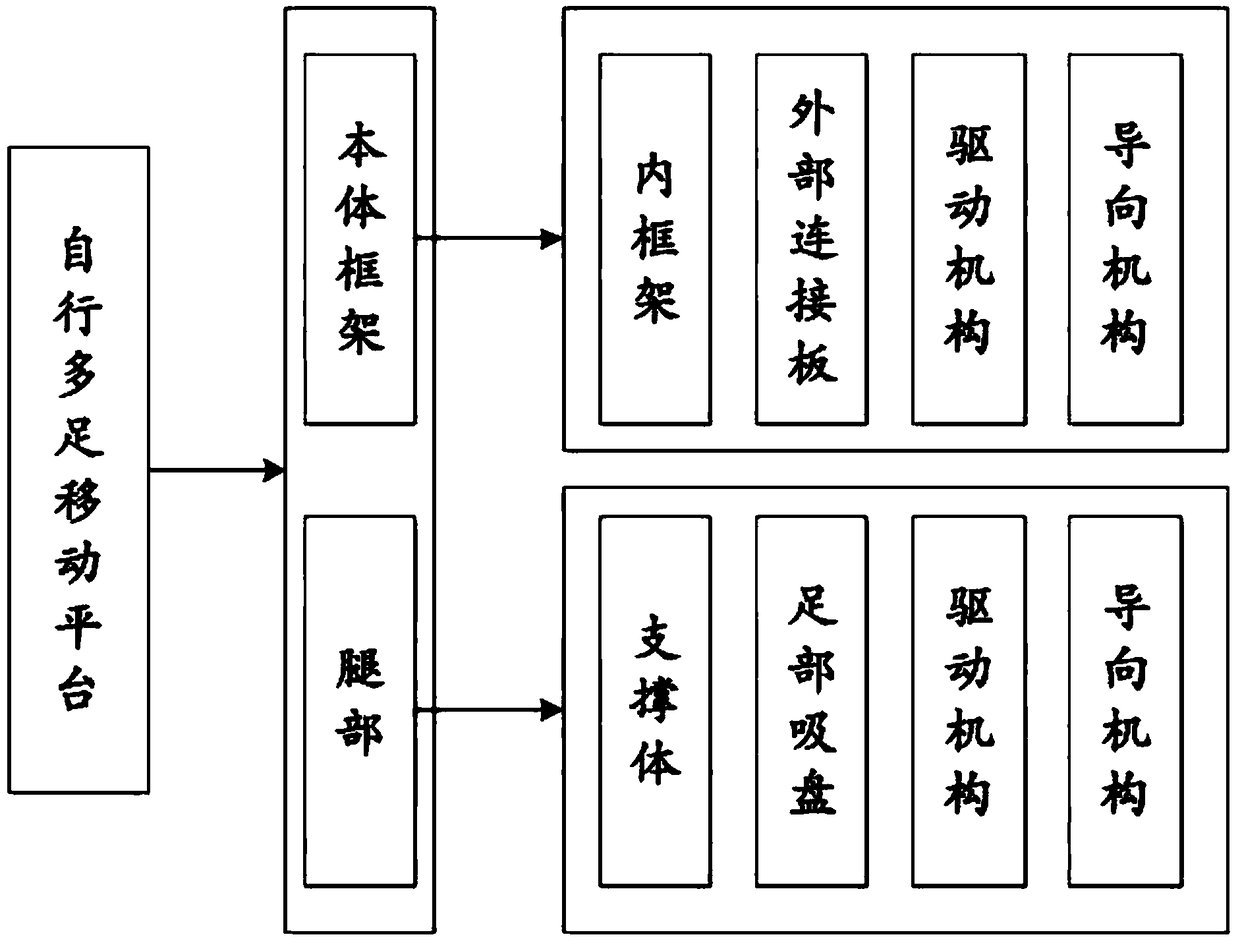
[0076] The autonomous crawling drilling and riveting system of the present invention adopts an inner and outer double-layer structure, and the system as a whole is mainly divided into the following major modules: inner frame 11 and inner leg 12; outer frame 13 and outer leg 14 and inner and outer leg suction cups 14a. Wherein, the inner frame 11 and four inner legs 12 form a group, and the outer frame 13 and four outer legs 14 form a group, which alternately move to realize the self-propelled function; each leg end is equipped with a vacuum suction cup to complete the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More