

A Motion Control Method of Quaternion Feedback Linearization for Permanent Magnet Spherical Motor
A feedback linearization, spherical motor technology, applied in the direction of model/simulation for control purposes, can solve problems such as deteriorating control effect, increasing control difficulty, and singularity, eliminating coupling between shafts, reducing motor control difficulty, and avoiding rotation. Effects of Strange Problems
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0040] The invention provides a motion control method for quaternion feedback linearization of a permanent magnet spherical motor. The invention will be described in detail below in conjunction with the accompanying drawings and simulation examples. The specific implementation steps of the present invention are as follows:
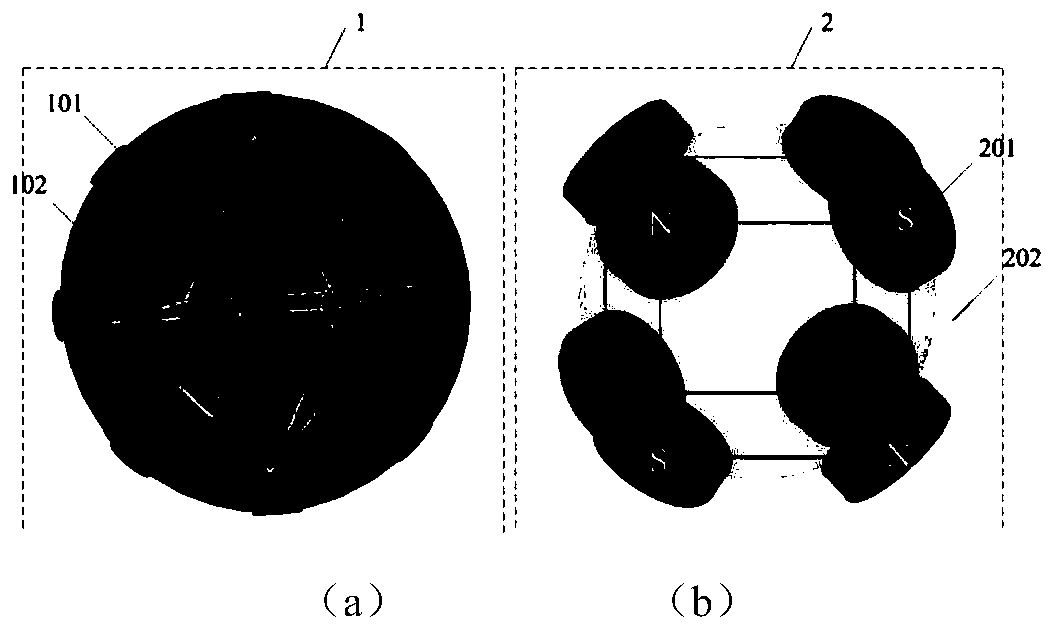
[0041] 1. The present invention selects as figure 1 The permanent magnet spherical motor is shown as an example, and the motor includes a stator part 1, a rotor part 2 and a support member. The stator part 1 is composed of a stator coil 101 and a stator spherical shell 102, wherein the material of the stator spherical shell 102 is polylactic acid (PLA), and the stator coil 101 is formed by winding copper enameled wire on a PLA cylinder, and the stator coil 101 is located on the stator spherical shell 102 There are 26 vertices, edge midpoints and face centers of the inscribed regular octahedron; the rotor part 2 is composed of a permanent magnet pole 201 a...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More