

Indoor feature point and structural line combination-based indoor SLAM (Simultaneous Localization and Mapping) method
A technology of structural lines and feature points, which is applied in the field of visual SLAM algorithm combining indoor feature points and structural lines, can solve the problems of large amount of calculation, poor regional effect, low positioning and composition accuracy, etc., to reduce drift error and alleviate drift Error, the effect of removing the accumulated drift error
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0060] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
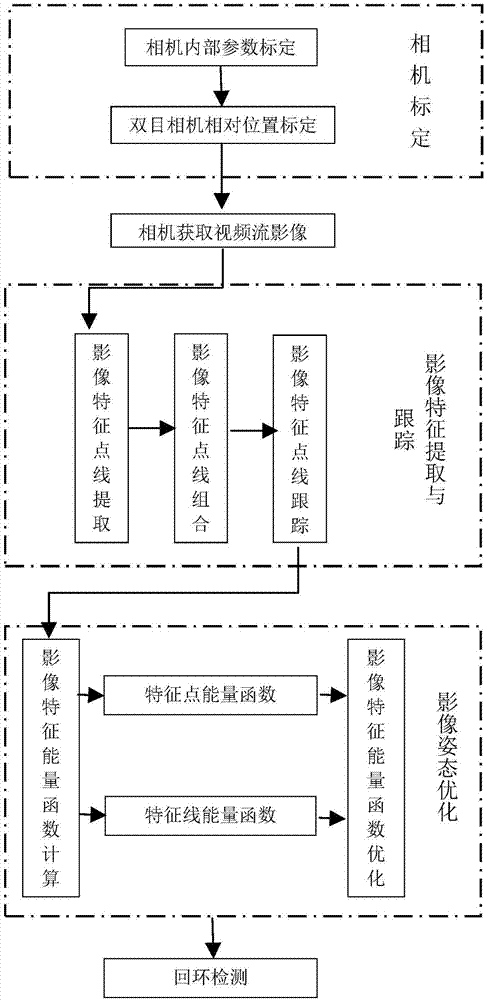
[0061] The technical solution adopted in the present invention is: an indoor SLAM method based on the combination of indoor feature points and structural lines, the specific implementation flow chart is shown in figure 1 , mainly including the following steps:
[0062] Step 1: Carry out camera internal reference (camera principal point, focal length and distortion coefficient) calibration;
[0063] Step 1.1: Use the camera to obtain multiple fixed-size checkerboard image data under different viewing angles;
[0064] Step 1.2: Use Zhang Zhengyou's camera calibration method to calculate the internal parameters of the camera on the acquired checkerboard image data to obtain the camera calibration results.
[0065] Step 2: Extract feature points and structural lines from the video frame image data acquired by the camera on the mobile robot platfo...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More