Light wall climbing robot and detecting method thereof
A wall-climbing robot, lightweight technology, applied in the direction of motor vehicles, transportation and packaging, can solve the problems of inability to adapt to the crawling operation on the inner and outer walls of the container, difficult adsorption force, weak ability to cross obstacles, etc., to improve detection efficiency and detection. Effectiveness, reduce processing weight and processing difficulty, and improve the effect of magnetic energy utilization
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
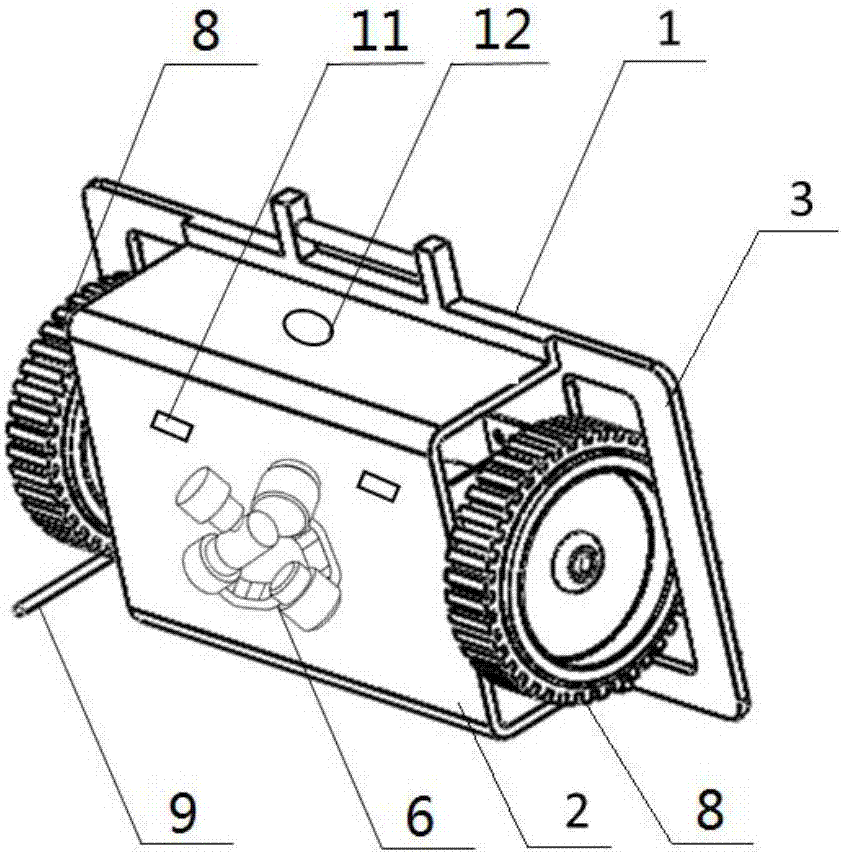
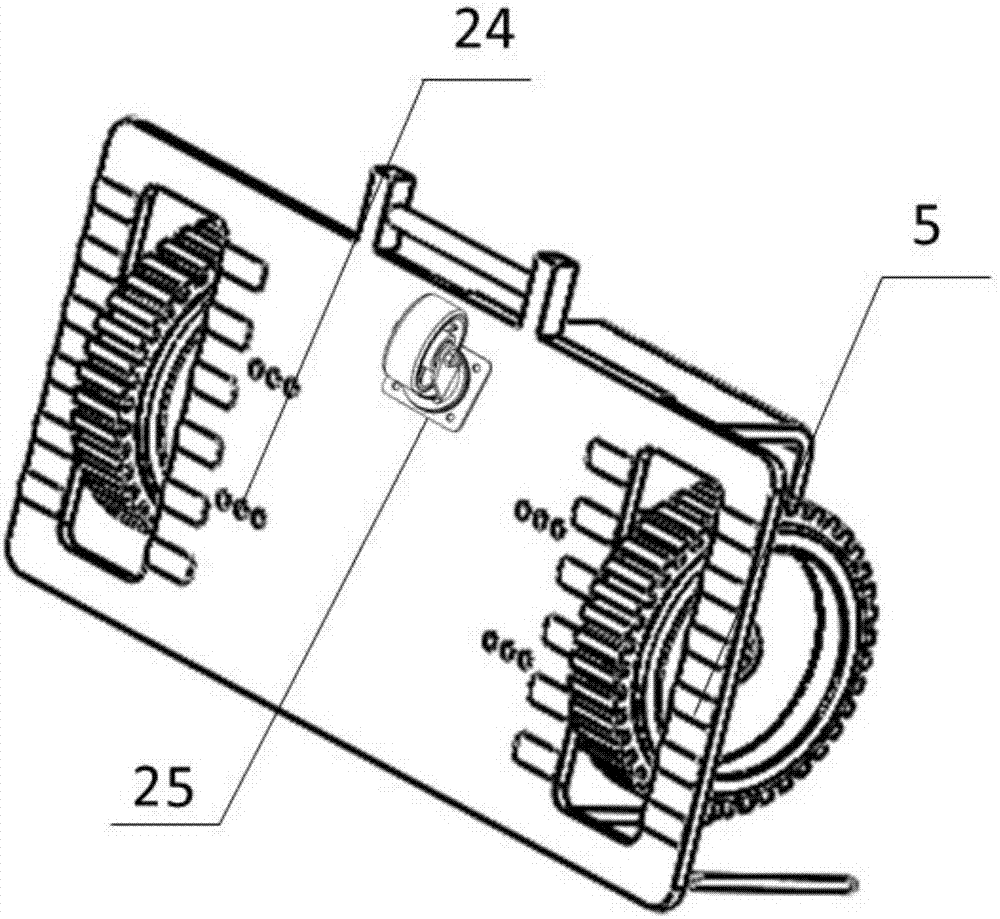
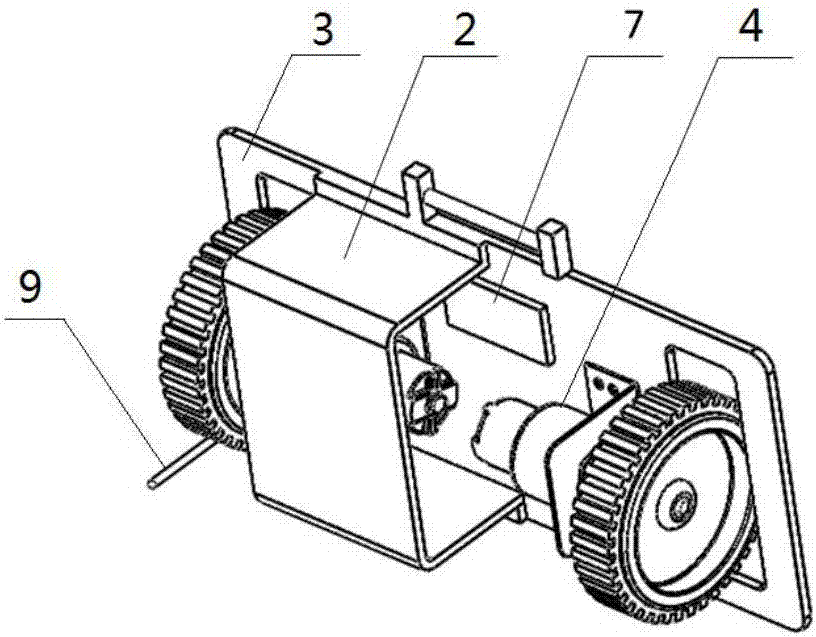
[0030] Embodiment 1 of the present invention: a lightweight wall-climbing robot. The wall-climbing robot of the present invention can move and turn freely on a horizontal wall, a vertical wall or a magnetically conductive wall with obstacles, including a robot body 1, a robot The main body 1 can be equipped with two kinds of automatic mechanical devices in welding, grinding or testing. The robot main body 1 includes a shell 2, a bottom plate 3, a driving device 4, an adsorption unit 5, a pan-tilt 6, and universal wheels 25. The shell 2 and the bottom plate 3 connection, the driving device 4 is set on the inner panel of the base plate 3, the adsorption unit 5 is set on the outer panel of the base plate 3, the universal wheel 25 is set on the outer panel of the base plate 3, and the pan platform 6 is set on the top surface of the housing 2 Above, the robot body 1 is provided with a control device 7, and the cloud platform 6 is electrically connected with the control device 7.
...
Embodiment 2
[0032] Embodiment 2 of the present invention: as Figure 1~6 As shown, a lightweight wall-climbing robot includes a robot body 1. The robot body 1 can be equipped with an automatic mechanical device in welding or grinding or detection. The robot body 1 includes a housing 2, a base plate 3, a driving device 4, The adsorption unit 5, the cloud platform 6 and the universal wheel 25, the housing 2 is connected with the base plate 3, the driving device 4 is arranged on the inner panel of the base plate 3, the adsorption unit 5 is arranged on the outer panel of the base plate 3, and the universal wheel 25 is arranged On the outer panel of the base plate 3 , the pan-tilt 6 is arranged on the top surface of the housing 2 , and the robot body 1 is provided with a control device 7 , and the pan-tilt 6 is electrically connected to the control device 7 .
[0033] Two driving wheels 8 are arranged on the robot body 1 , and adsorption units 5 are arranged on both sides of each driving wheel...
Embodiment 3
[0040] Embodiment 3 of the present invention: a detection method of a light-weight wall-climbing robot. The detection device 18 provided on the robot body 1 transmits the acquired image information to the control device 7 through an electrical signal, and the control device 7 controls the received image. After the information is processed by filtering, edge detection and image binarization, the object to be tested is classified and identified in the area to be detected, and then the object to be tested is calibrated to form a corresponding detection image.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com