

Modular industrial robot reconstruction system and control method thereof
A technology for reconstructing systems and robots, applied in the direction of program control manipulators, manipulators, manufacturing tools, etc., can solve the problems of lack of robot kinematics and dynamics model establishment and solution algorithms, lack of robot reconfiguration control methods, etc., to achieve easy control The effect of systematic analysis and synthesis, easy programmatic realization, and simple calculation form
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the purpose, technical solutions and advantages of the embodiments of the present invention clearer, the technical solutions in the embodiments of the present invention will be clearly and completely described below in conjunction with the drawings in the embodiments of the present invention. Obviously, the described embodiments It is a part of embodiments of the present invention, but not all embodiments. Based on the embodiments of the present invention, all other embodiments obtained by persons of ordinary skill in the art without creative efforts fall within the protection scope of the present invention.
[0037] The technical scheme of the present invention is further described below in conjunction with accompanying drawing and specific embodiment:
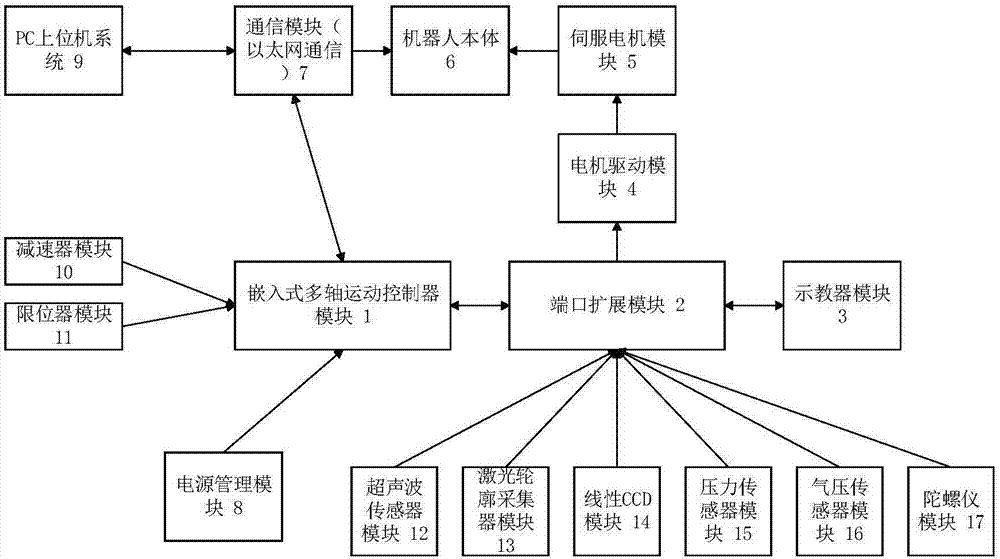
[0038] Such as figure 1 As shown, a modular industrial robot reconstruction system mainly includes: upper computer, communication unit, robot body, embedded multi-axis motion controller unit, port exp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More