

Driving device for robot gripper
A driving device and robot hand technology, which is applied in the direction of manipulators, chucks, manufacturing tools, etc., can solve the problems of inconvenient adjustment of hand claws, failure to use normally, and limited scope of application, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The standard parts used in the present invention can be purchased from the market, and the special-shaped parts can be customized according to the instructions and the accompanying drawings. The specific connection methods of each part adopt mature bolts, rivets, welding in the prior art , pasting and other conventional means, will not be described in detail here.
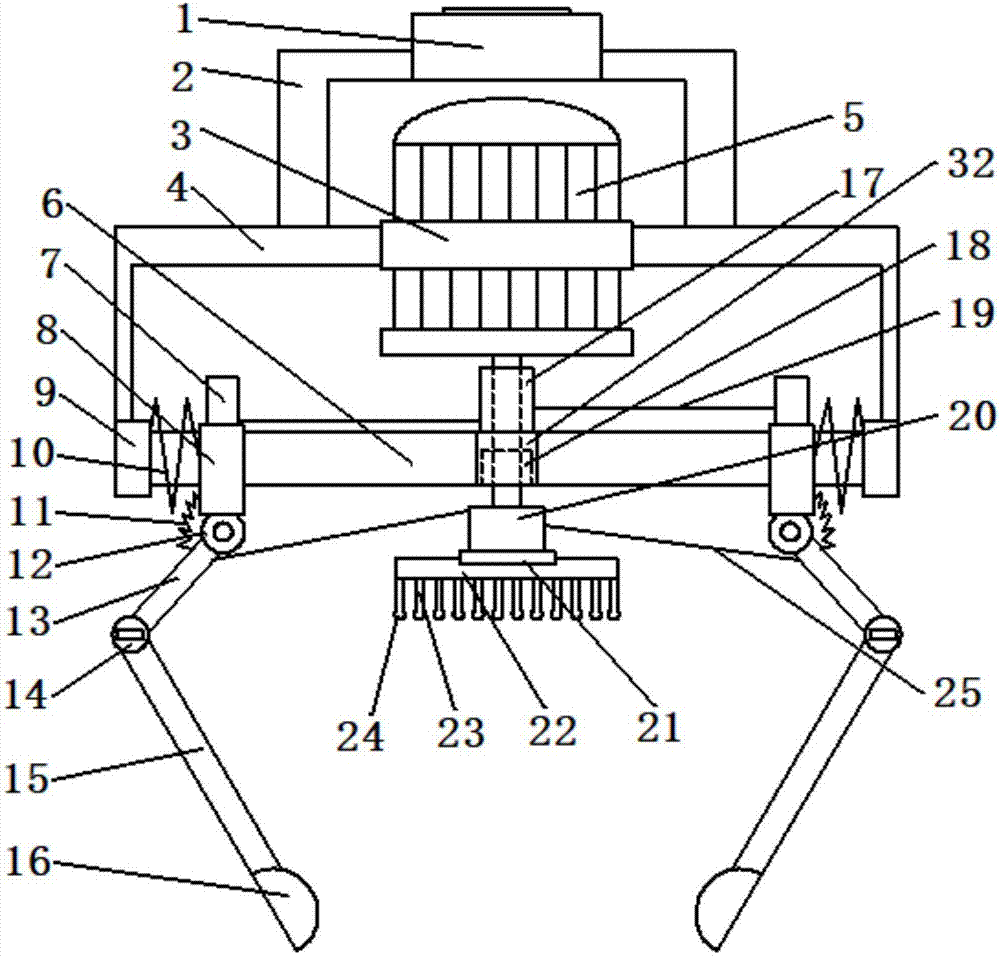
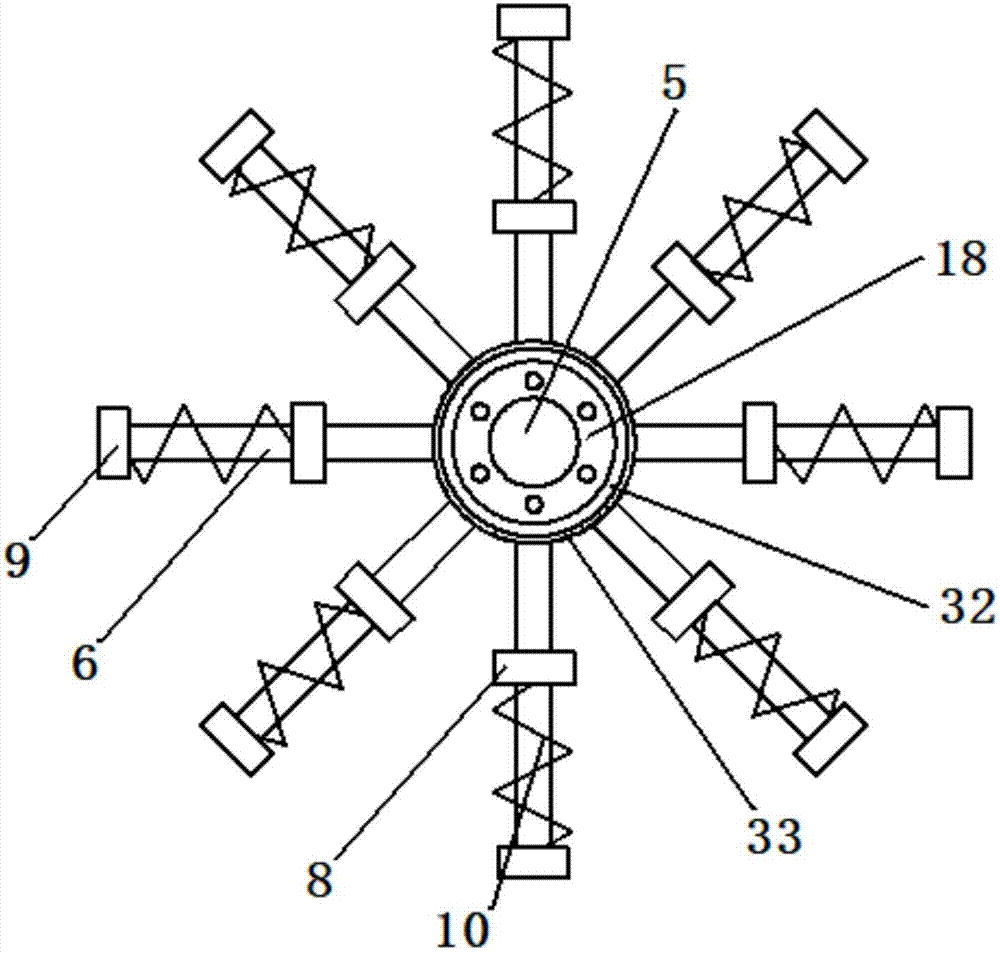
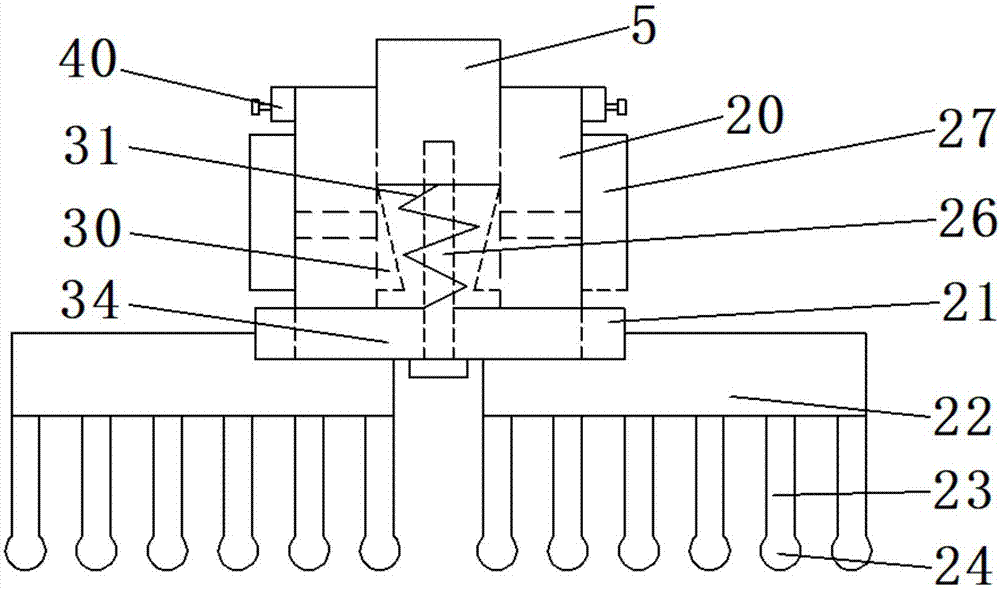
[0020] refer to Figure 1-5, a specific embodiment of the present invention includes a mounting flange 1, a first bracket 2 is fixedly connected to the bottom of the mounting flange 1, a second bracket 4 is fixedly connected to the bottom of the first bracket 2, and the inner side of the second bracket 4 is fixed by The sleeve 3 is fixedly connected with a motor 5, the shaft of the motor 5 is movably connected with a second collar 32 through the first bearing 18, and the outer side of the second collar 32 is fixedly connected with a plurality of annularly arranged first slide bars 6, the second The outer si...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More