

Nonlinear control allocation method based on depth autoencoder network
A self-encoding network, nonlinear control technology, applied in the field of nonlinear control distribution, can solve problems such as inability to handle nonlinear objects, achieve the effect of convenient distribution means, wide application, and make up for serious deficiencies
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
[0037] Consider a class of hypersonic vehicles with six control surfaces. Among them, a pair of ailerons are mainly used for roll control, a pair of V tails are used for sideslip and pitch control, a body flap is used for pitch control, and a speed brake is also equipped. Although the six control surfaces are functionally divided, there is an obvious coupling between them.
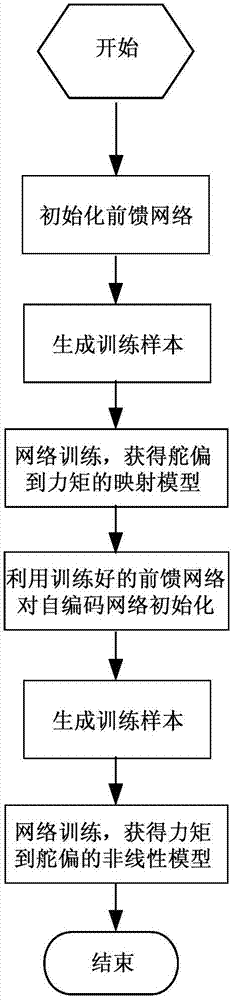
[0038] First, construct a multi-layer feed-forward neural network according to step (1), and generate a total of 90,000 sets of training samples and 20,000 sets of random test samples. The hidden layer activation function of the network is selected as a conventional sigmoid function, and the output layer activation function is selected as a linear function. The network is initialized using the greedy layer-by-layer pre-training method in deep learning.
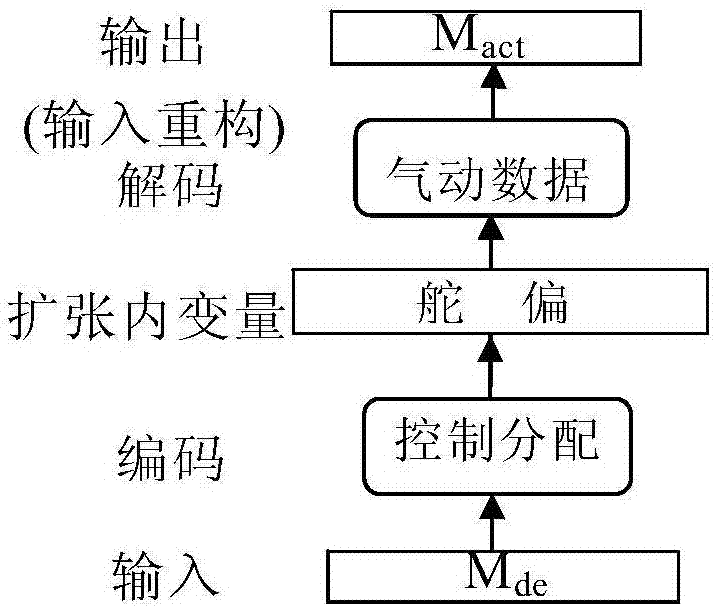
[0039] Secondly, using the aforementioned multi-layer feed-forward neural network as a decoder, a deep autoencoder neural network is constructed. Among...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More