

Stable tether dragging control method for space debris
A stability control method and space debris technology, applied in the field of spacecraft relative motion and flexible tether control, and tether dragging stability control, can solve problems such as instability and system oscillation
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
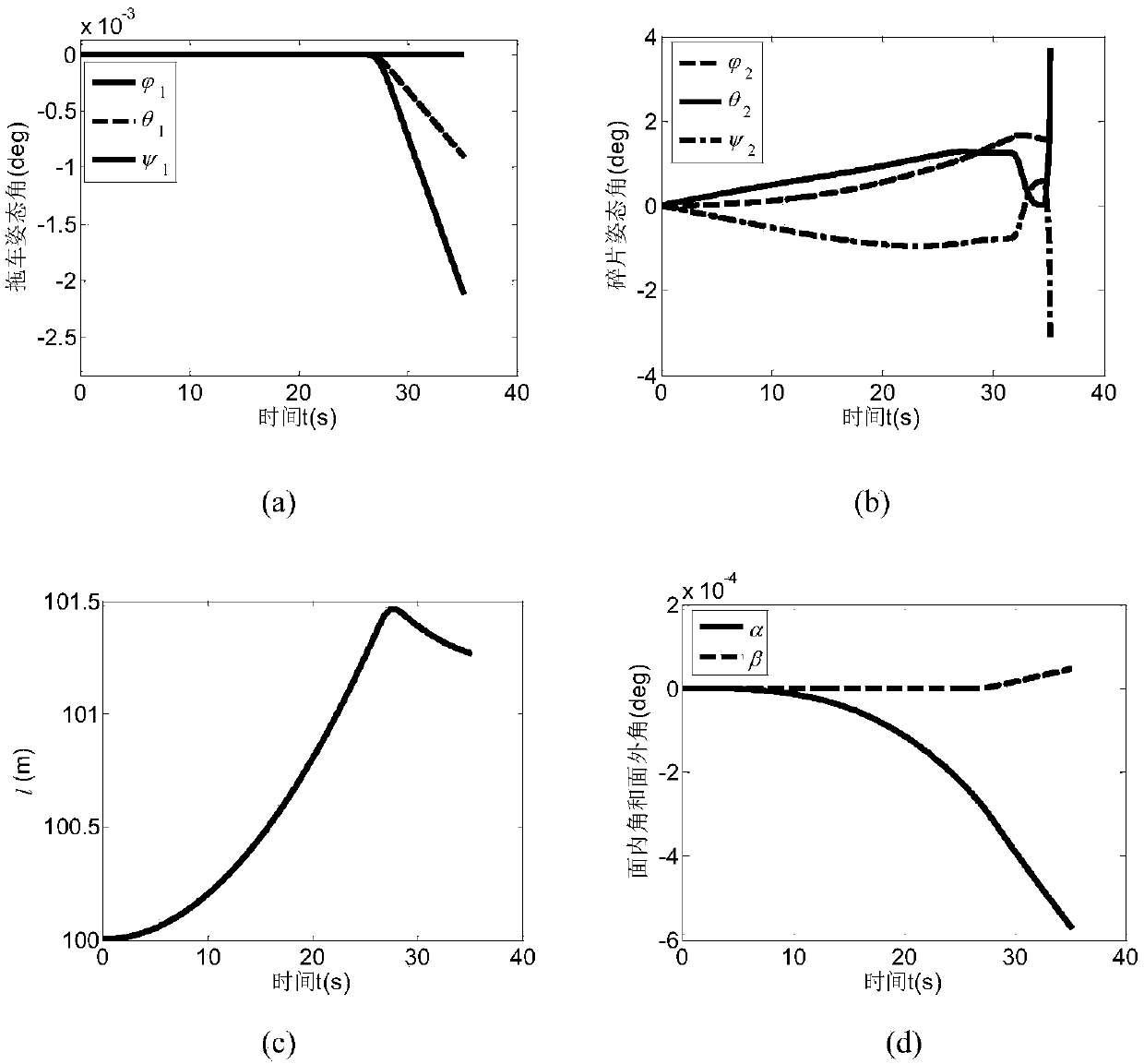
[0142] Firstly, the dynamic simulation is carried out for the tethered trailer system in the uncontrolled state. The initial relative motion parameters of the system are The original length of the tether was 99.126m.
[0143] Using the data of Example 1 in Table 1, the dynamics simulation of the tethered trailer system under uncontrolled conditions is carried out. Figure 4 The open-loop relative motion of the tethered trailer system is shown. The curves in the figure show that the trailer and the debris present a continuous tumbling motion in one direction under the influence of the initial angular velocity of the debris. After about 30 seconds, the system entered a chaotic state, the angular velocity of the debris and the trailer increased sharply, and the swing range of the system also increased significantly. This state of motion is likely to cause breakage of the tether and loss of control of the system, and has a destructive effect on the normal operation of the tra...
Embodiment 2
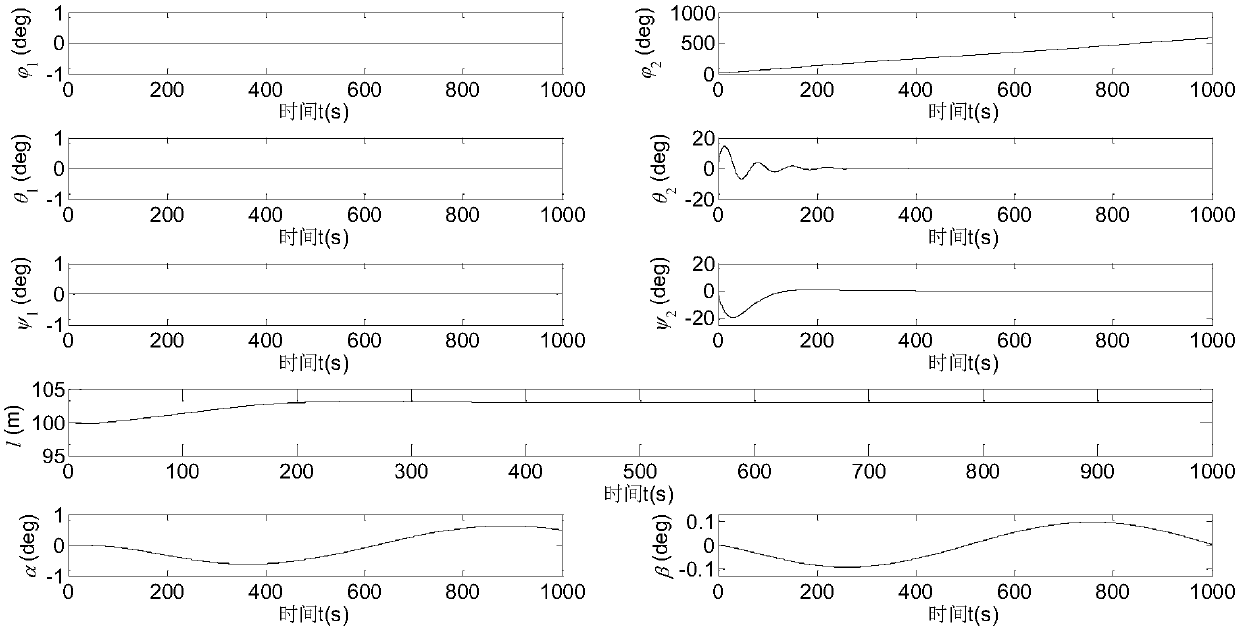
[0148] In the second embodiment, according to the size of the debris, the offset of the connection point of the tether on the debris is limited within the range of [-2, 2] meters in both the y-axis and z-axis directions. Figure 5 It shows the closed-loop relative motion of the system in the second embodiment. As shown in the figure, the attitude angle of the trailer is stably maintained near zero under the action of the attitude control torque generated by itself, and the rotation of the debris in the pitch and yaw directions is effectively slowed down under the action of the offset control strategy. and eventually converges to zero. At the same time, the center-of-mass distance l of the trailer debris gradually converges to the target value after 400 seconds, and the system exhibits a slight regular swing. Overall, through the designed control strategy, the attitude oscillation of the trailer and debris is effectively suppressed, and the overall swing of the system is also ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More