

Autonomous navigation unmanned aerial vehicle system and navigation method thereof
A technology for autonomous navigation and unmanned aerial vehicles, which is applied to control/adjustment systems, position/direction control, 3D position/channel control, etc., and can solve problems such as being easily crashed, difficult to use, and powerless for MAVs.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
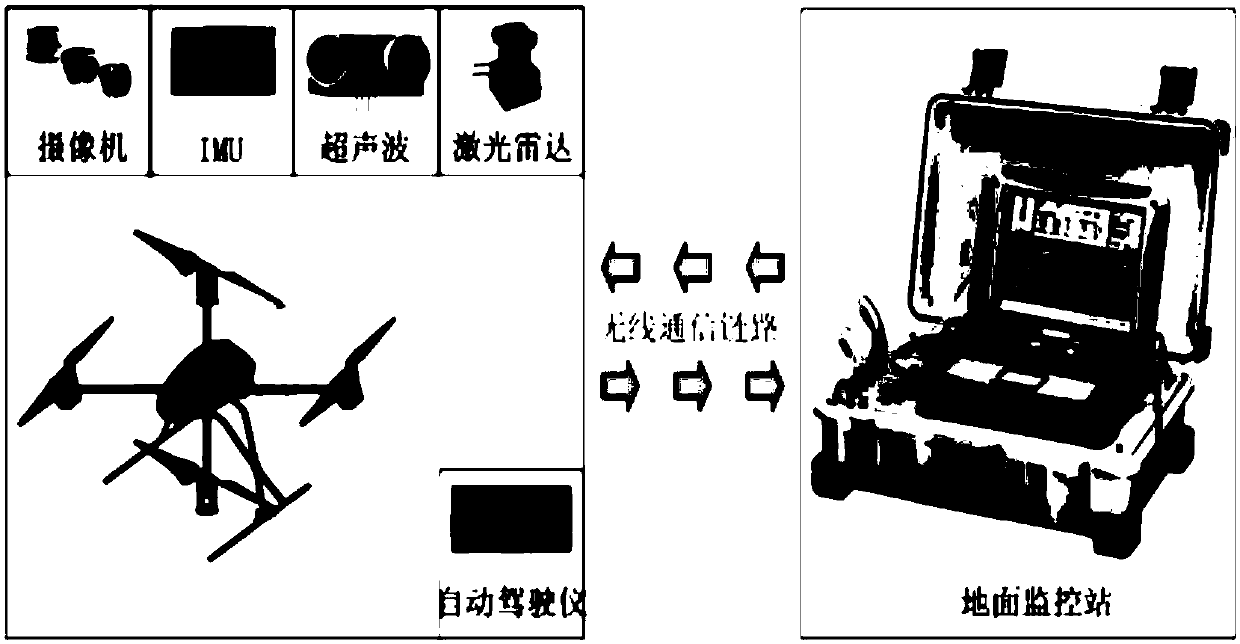
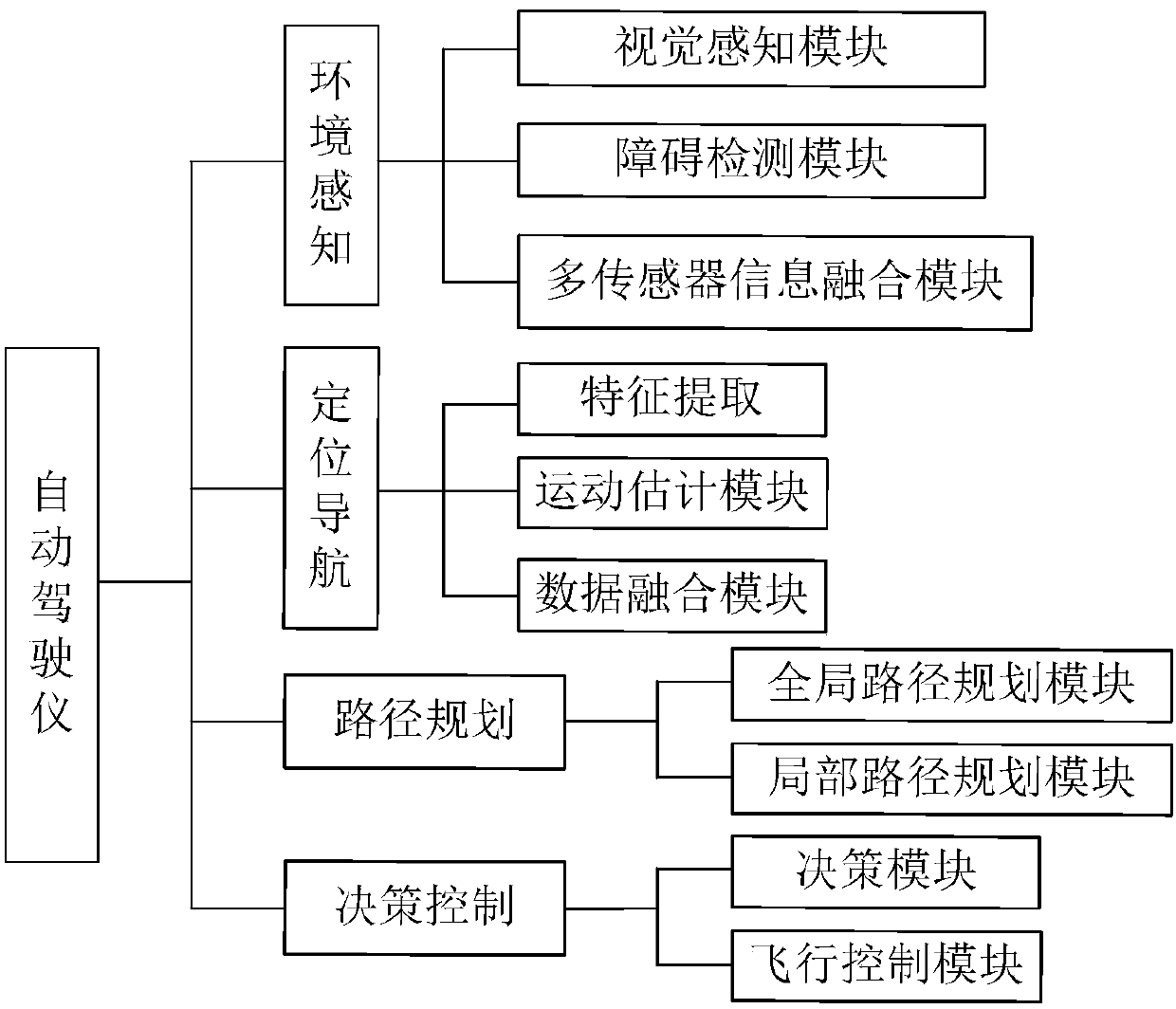
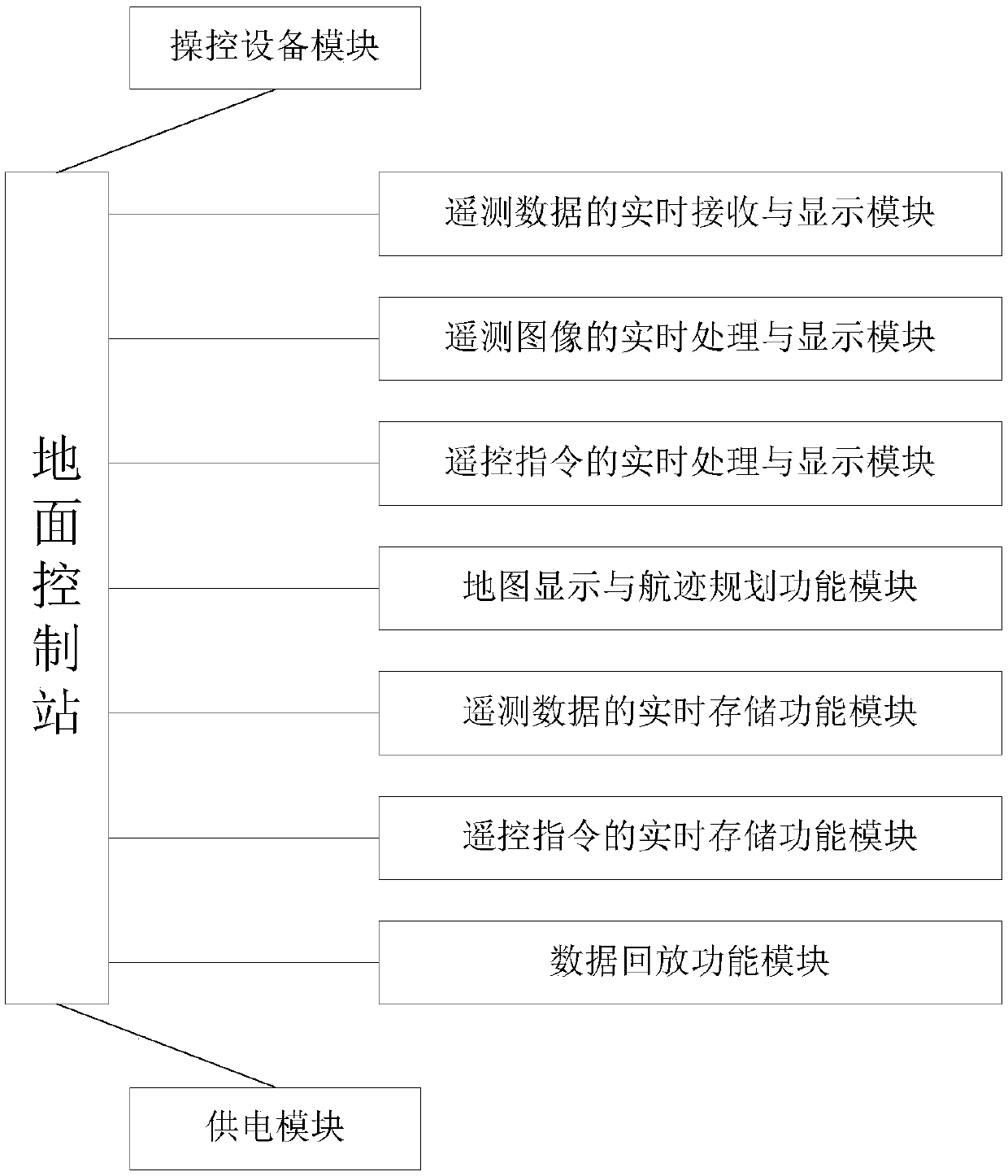
[0082] Example 1, such as figure 1 As shown, an autonomously navigating UAV system according to an embodiment of the present invention includes: an aircraft platform, a sensor subsystem, an autopilot, a remote controller, and a ground monitoring station.
[0083] The aircraft platform is a quadrotor aircraft. The quadrotor aircraft is equipped with a GPS positioning module. The GPS positioning module receives satellite signals to determine the current latitude and longitude position of the quadrotor aircraft and provide basic data for navigation. Among them, the four-rotor aircraft wing is a four-axis aircraft, and the rotors are symmetrically installed on four axes, and the rotors on the same diagonal form a group, and four small brushless DC motors are symmetrically installed on the four-axis rotors to drive four A rotor spins at high speed. By changing the speed of the brushless DC motor, the flight functions of the aircraft such as forward flight, side flight, climb, and ...
Embodiment 2
[0136] Embodiment 2, a kind of navigation method of the unmanned aerial vehicle system of autonomous navigation, comprises the following steps:
[0137] Step 1, install a GPS positioning module, an inertial measurement unit, a miniature camera, an ultrasonic sensor and a laser scanning radar on the aircraft platform;
[0138] Step 2, the autopilot is connected with the GPS positioning module, the inertial measurement unit, the miniature camera, the ultrasonic sensor and the laser scanning radar through wireless network communication;
[0139] Connect the ground monitoring station and the autopilot through a wireless network;
[0140] Step 3, setting the task of flying the UAV on the ground monitoring station, including the waypoint of the flight and the attitude of the flight action;
[0141] Step 4, the quadrotor aircraft starts to fly according to the task, the GPS positioning module receives the satellite signal, determines the current latitude and longitude position of th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More