

360-degree driving recording system and method based on bidirectional fisheye camera
A fisheye camera, driving record technology, applied in the registration/indication of vehicle operation, image enhancement, image analysis, etc., can solve problems such as inability to meet visual consistency, and achieve the effect of improving processing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
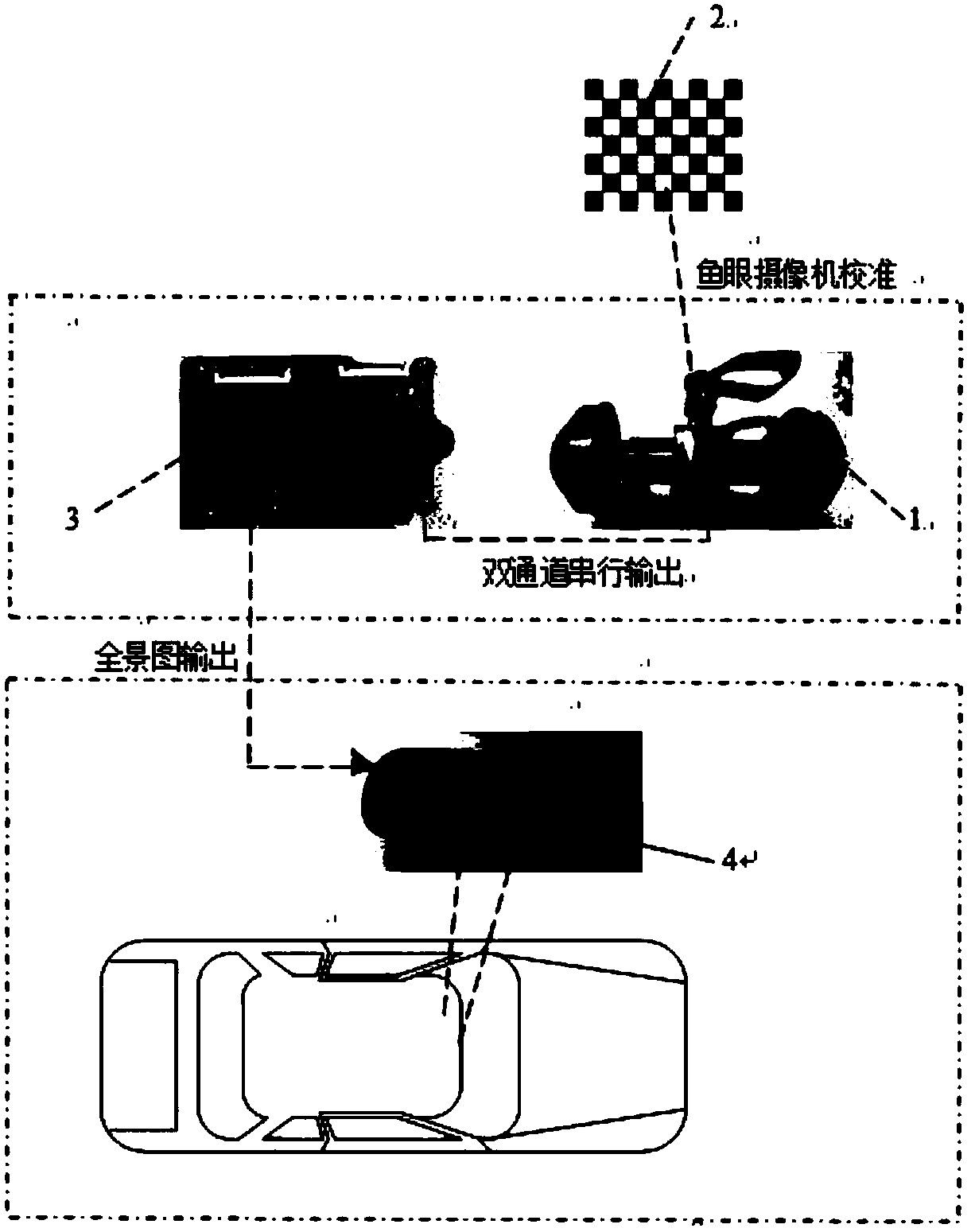
[0031] see figure 1 , the vehicle recording system based on a two-way fisheye camera to form a 360° panorama, comprising a fisheye camera (1), a calibration board (2), a single-chip microcomputer (3), and a rearview mirror (4). It is characterized in that: the single-chip microcomputer (3) is connected to the fisheye camera (1) and the rearview mirror (4), and the power supply provides working power to the singlechip (3), the fisheye camera (1) and the rearview mirror (4), The calibration board (2) is placed at a position where the fisheye camera (1) can shoot; the fisheye camera (1) is connected to the single-chip microcomputer (3) in a back-to-back manner, and the captured video stream image is processed by the single-chip microcomputer (3) and then output to the The rearview mirror (4) displays; the fisheye camera (1) is used to obtain the video stream image of the driving surrounding environment, the adopted fisheye camera (1) is a two-way fisheye camera, and the captured ...
Embodiment 2
[0033] This embodiment is basically the same as Embodiment 1, and the special features are as follows:
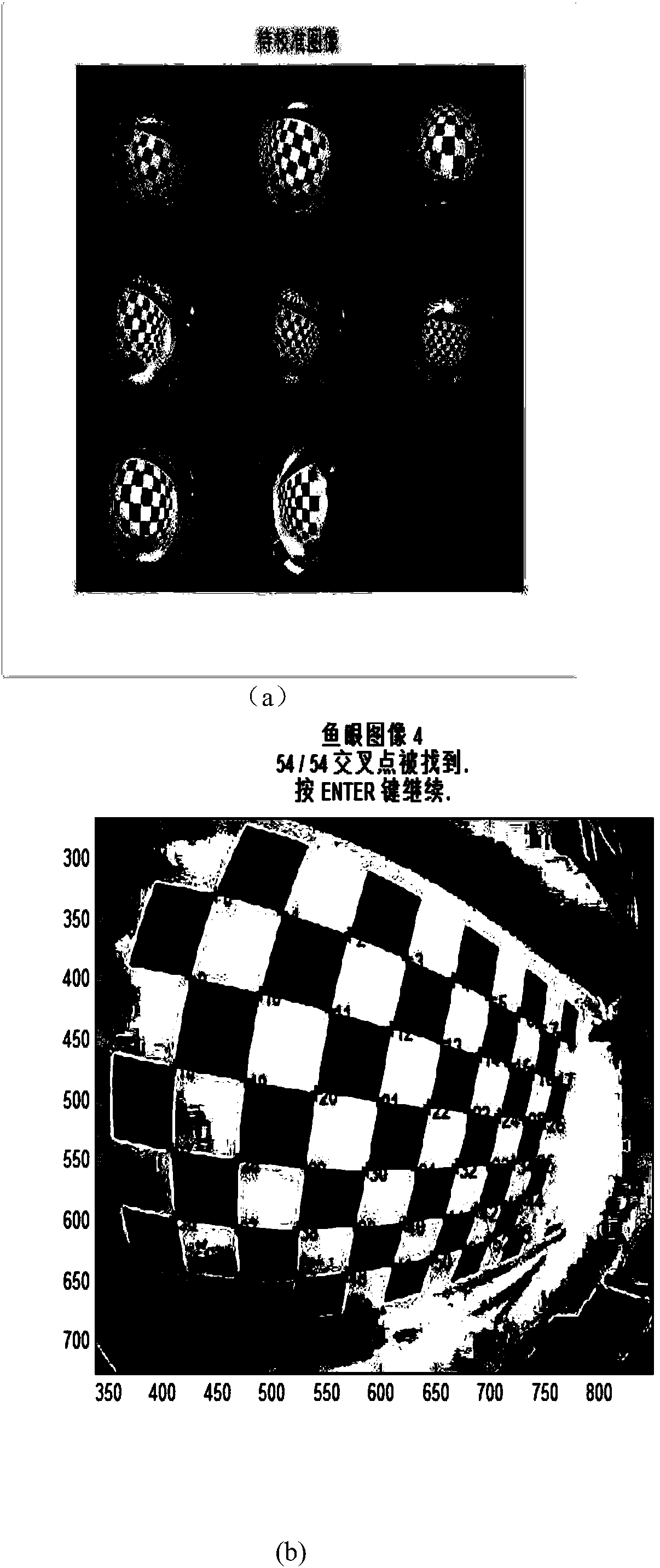
[0034] The distortion parameters in each direction of the fisheye camera (1) are obtained by photographing the calibration plate (2) with the fisheye camera (1), and the position information of the black and white grid intersections is extracted by using a checkerboard corner point extraction algorithm. Obtained in calibration;
[0035] The fisheye camera (1) and the single-chip microcomputer (3) carry out serial port communication through dual-channel image acquisition and serial output mode, and obtain 360 ° video stream images about the driving surrounding environment by multi-threading at 25 frames / time. The second rate is output to single-chip microcomputer (3), and single-chip microcomputer (3) transfers internal reference and external reference of fisheye camera (1) to process the video stream image;
[0036] The mosaic 360 ° panorama of the surrounding environment ...
Embodiment 3
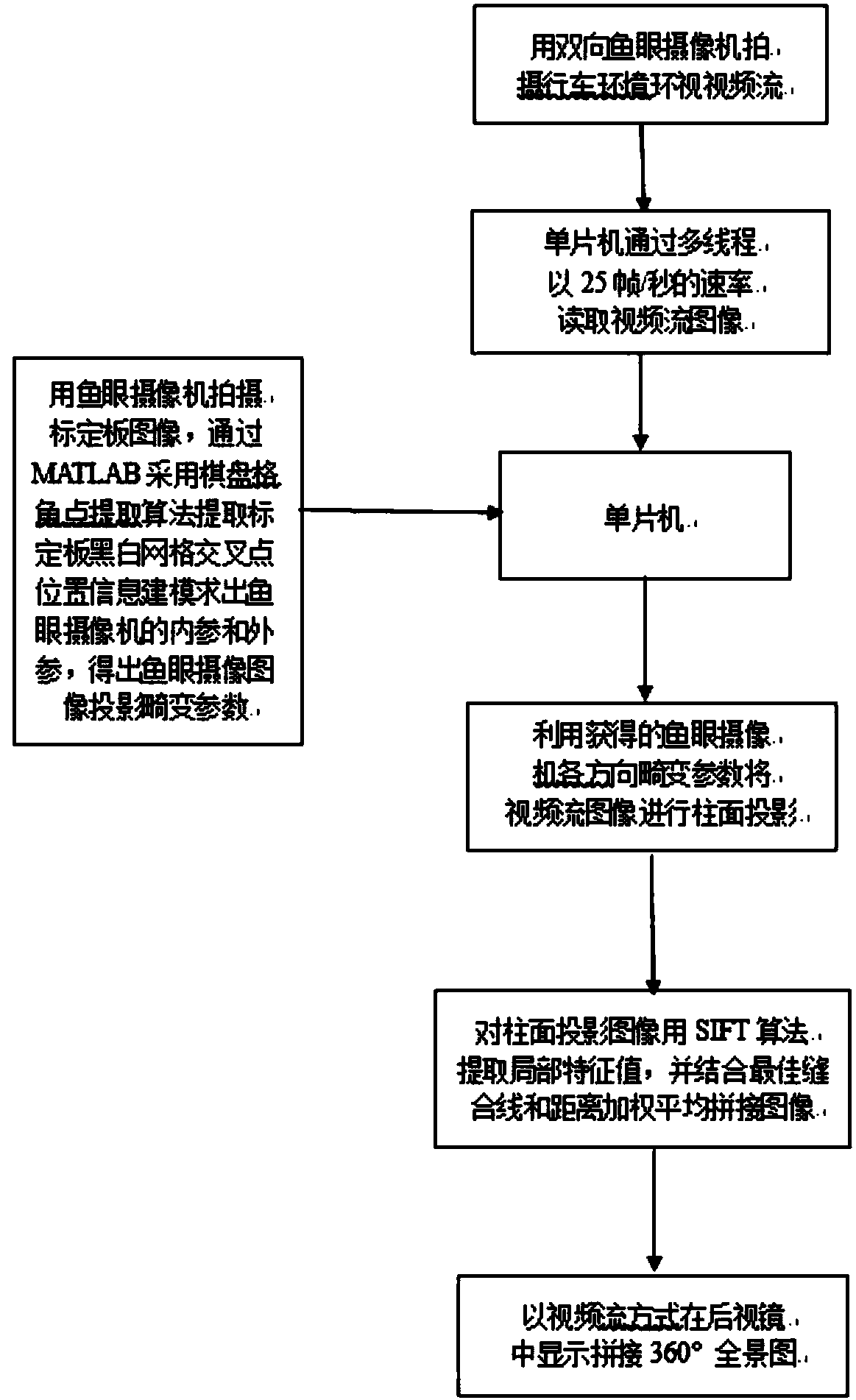
[0038] see figure 2 , the driving recording method based on the two-way fisheye camera to form a 360 ° panorama, using the above-mentioned system to operate, is characterized in that the specific operation steps are as follows:
[0039] 1) Use the fisheye camera (1) to take images of multiple poses of the calibration board (2), calibrate the intersection points of the black and white grids on the calibration board image, and project the 3D actual points onto the pixels of the image plane to form the image forming function g Through Taylor series expansion, using the geometric relationship of the calibration plate to establish a system of equations, the expansion coefficient constituting the camera calibration parameters is estimated by solving the two-step least squares problem, and the internal and external parameters of the fisheye camera are obtained through the corresponding relationship of projection transformation , to obtain the projection distortion parameters of the fi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More