

Linear motor module for robot splicing
A technology of linear motors and robots, applied in the direction of electromechanical devices, manipulators, electrical components, etc., can solve problems such as insufficient rigidity, limited movement speed and load strength, and cumbersome assembly, so as to improve dynamic response performance, avoid backlash, Responsive and fast effects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
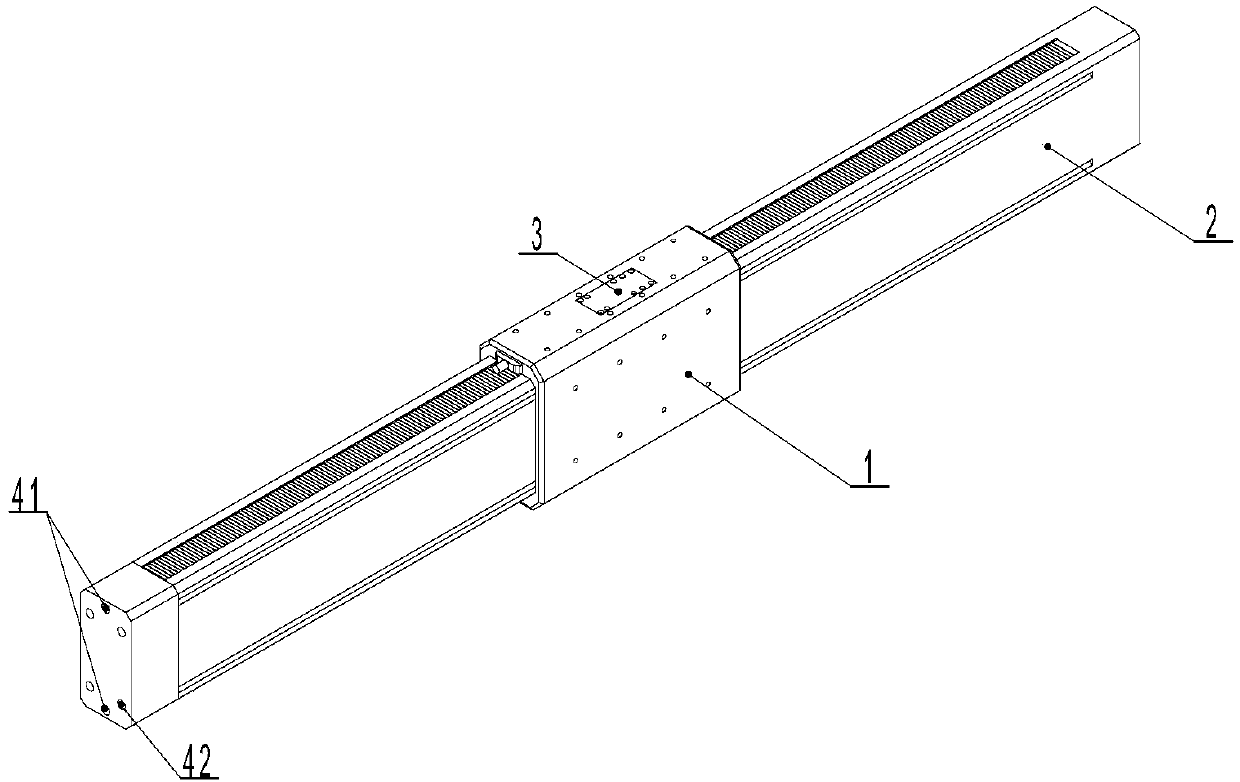
[0032] Such as figure 1 , a linear motor module for robot splicing, including a mover assembly 1, a stator assembly 2, a brake 3 connected to the mover assembly 1, and a controller, the mover assembly 1 is sleeved on the stator assembly 2 On; the moving subassembly 1 and the stator assembly 2 are provided with connecting holes 4;
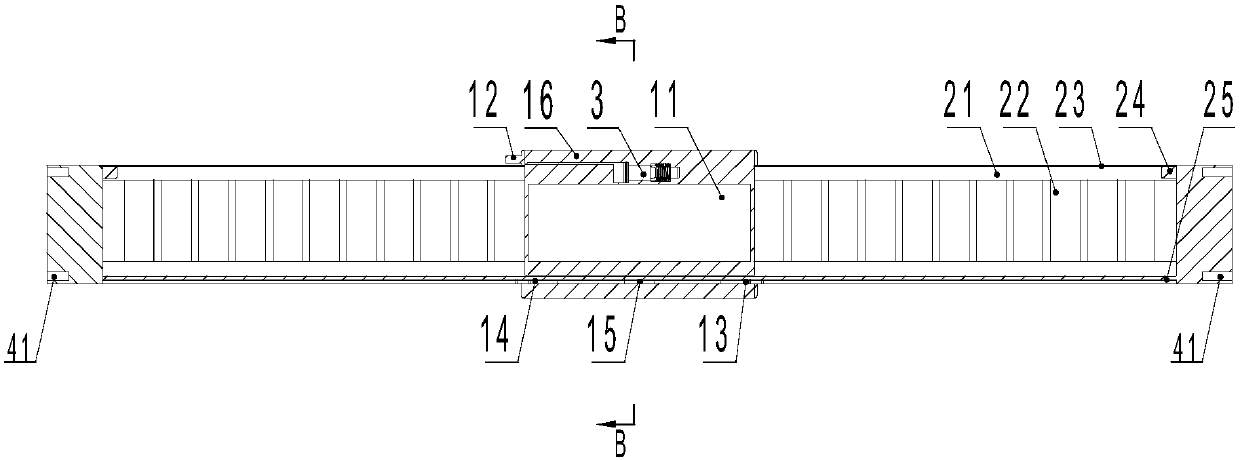
[0033] Such as image 3 , the moving subassembly 1 includes a casing 16, a coil 11, a joint 12, a grating reading head 15, a first limit switch 13 and a second limit switch 14, the casing 16 is sleeved on the stator assembly 2, the The coil 11 is nested in the stator assembly 2, the housing 16 is fixedly connected to the coil 11, the grating reading head 15 is arranged in the middle of the inner wall of the housing 16, the first limit switch 13 and the The second limit switch 14 is respectively arranged at both ends of the housing 16, the connector 12 is fixed on the housing 16, and the connector 12 is electrically connected to the coil 11 or the ...
Embodiment approach
[0058] Several splicing implementation modes of the present invention are as follows:
[0059] Such as Figure 6 , connected into an embodiment of a parallel robot. Fix the stator assembly on the bracket, and attach the arm of the robot to the mover assembly. The figure shows a three-axis parallel robot. In addition to the implementation shown in the figure, it can also be multi-axis parallel, using multiple linear motor modules of the present invention as the drive structure, and each linear motor module is electrically connected to the controller. The motion of each linear motor module is individually controlled by the controller.
[0060] Such as Figure 7 , connected into an embodiment of a Cartesian robot. refer to Figure 7 In the structure shown, the support bar can be a conventional column, or the linear motor module of the present invention can be used as the support bar. Each linear motor module is electrically connected to the controller, and the controller con...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More