

Vacuum adsorption terminal actuator for single-double box grasping
An end effector and vacuum adsorption technology, which is applied in the stacking of objects, destacking of objects, and manipulators, etc., can solve the problems of product, food contamination, limited clamping position, and easily damaged products, etc., to improve efficiency, The effect of reducing burden and ensuring diversity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The technical scheme of the present invention will be further described in detail below in conjunction with the accompanying drawings.
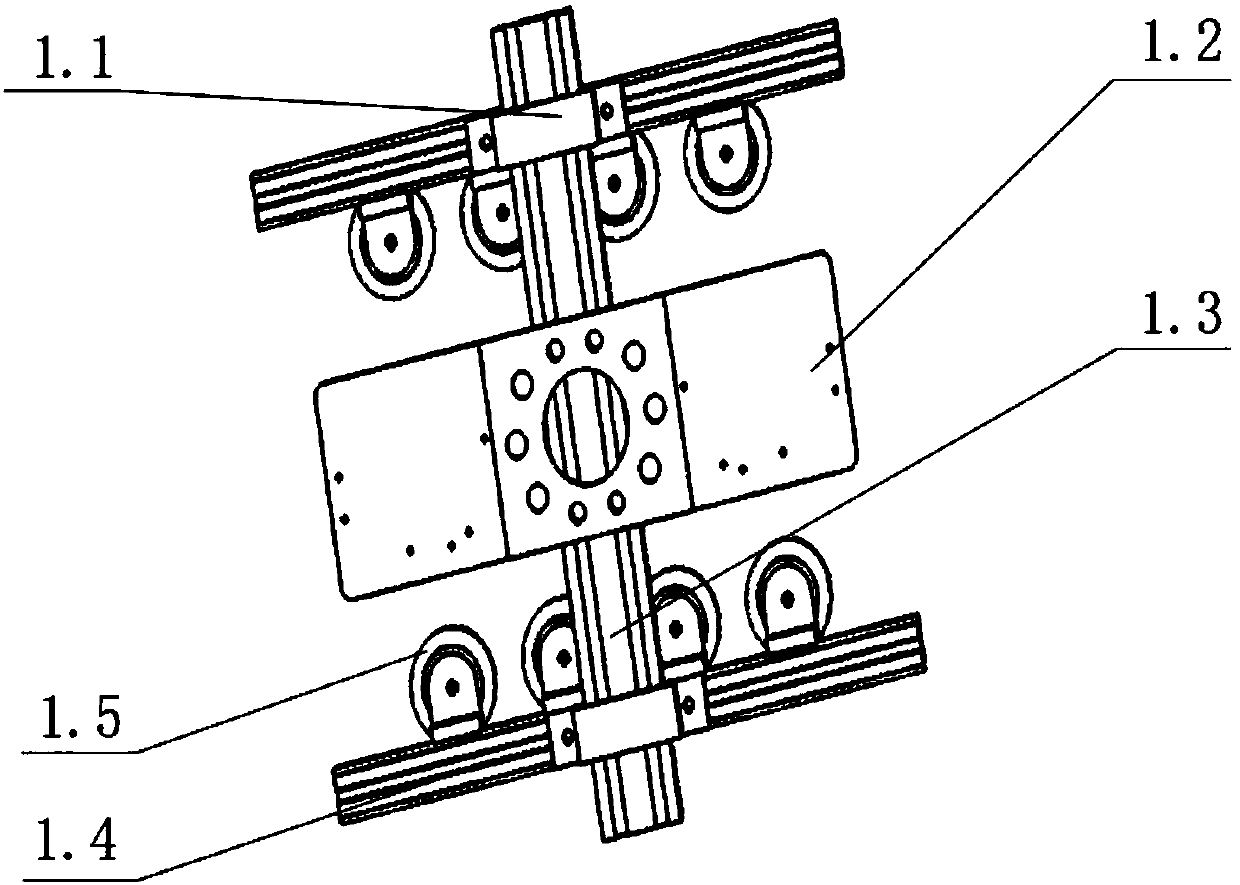
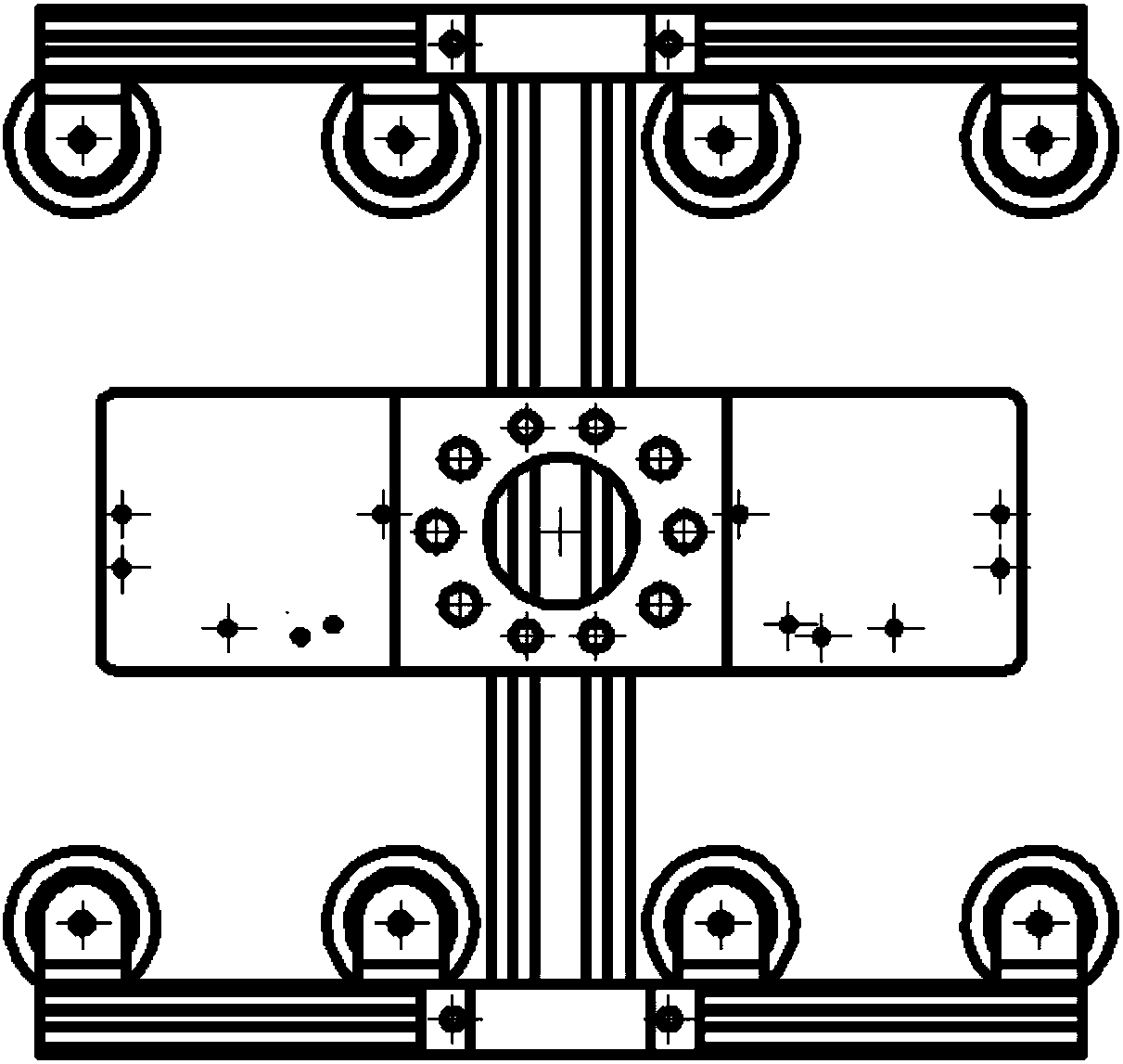
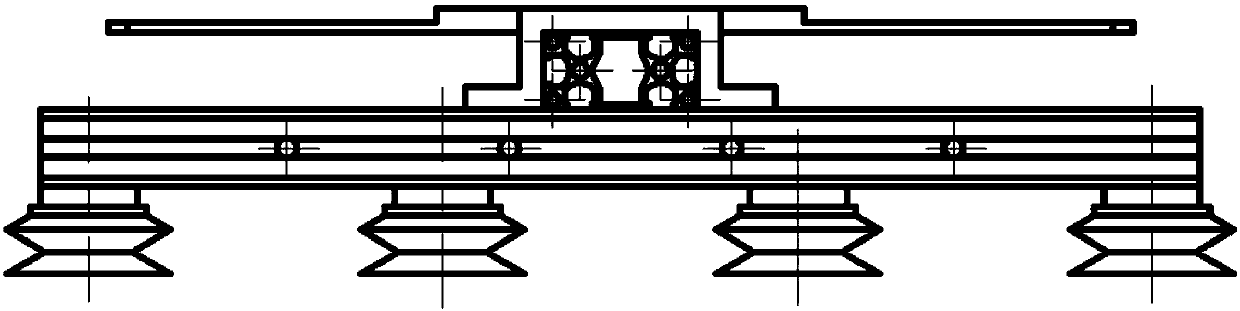
[0020] The vacuum adsorption type end effector used for grabbing single and double boxes in the present invention is as follows: Figure 1-3 As shown, it is composed of connecting block 1.1, connecting plate 1.2, longitudinal slide rail 1.3, transverse slide rail 1.4, vacuum adsorber 1.5, solenoid valve, etc.; connecting plate 1.2 is connected to the end of the mechanical arm through bolts, and connecting plate 1.2 is The rail 1.3 is connected with two identical connecting blocks 1.1, and the two identical connecting blocks 1.1 are respectively installed on two identical horizontal slide rails 1.4, and the vertical slide rail 1.3 is vertically arranged with the two horizontal slide rails 1.4, and the vertical slide rail 1.3 Connect the vacuum adsorber 1.5 via the connection block. The connection plate 1.2 is directly connected to the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More