Doppler velocimeter speed correction method and autonomous underwater vehicle navigation error correction method
A Doppler velocimeter, autonomous vehicle technology, applied in instruments, fluid velocity measurement, navigation calculation tools, etc., can solve the problem that the navigation filtering algorithm is difficult to effectively improve the navigation accuracy, and it is difficult to meet the requirements of cost control, reliability and reliability. Applicability discounts and other issues, to achieve the effect that parameter adjustment is easier to operate, easy to implement, and has a wide range of applications
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
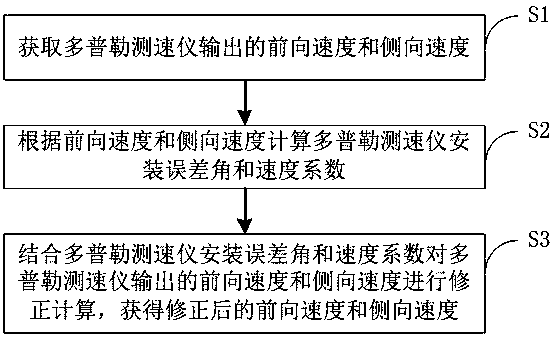
[0059] This embodiment provides a method for correcting the velocity of a Doppler velocimeter, such as figure 1 shown, including the following steps:
[0060] S1. Obtain the forward velocity and lateral velocity output by the Doppler speedometer;
[0061] S2. Calculate the installation error angle and velocity coefficient of the Doppler velocimeter according to the forward velocity and the lateral velocity;
[0062] S3. Combining the installation error angle and the speed coefficient of the Doppler velocimeter, the forward velocity and the lateral velocity output by the Doppler velocimeter are corrected and calculated to obtain the corrected forward velocity and the lateral velocity.
[0063] In the above-mentioned Doppler Velocimeter speed correction method, before the navigation algorithm inputs the sensor information, the installation error angle correction and velocity coefficient identification of the DVL (Doppler Velocimeter) are carried out first, and then smoothing fi...
Embodiment 2
[0082] This embodiment provides a navigation error correction method for an underwater autonomous vehicle. Before the underwater unmanned autonomous vehicle introduces the heading information into the dead reckoning algorithm, the DVL installation error angular velocity coefficient is first calculated by the least square method, and then the two The group parameters are fed back to the output speed information for correction, and finally the corrected speed information is introduced into dead reckoning after being smoothed by αβ filtering, which specifically includes the following steps:
[0083] S2-1. Adopt the method for correcting the speed of the Doppler velocimeter in Embodiment 1 to obtain the corrected forward velocity and lateral velocity (if there is filtering and smoothing processing, then the forward velocity and lateral velocity after filtering and smoothing processing) );
[0084] S2-2. Introducing the corrected forward velocity and lateral velocity into dead reck...
Embodiment 3
[0093] This embodiment provides a navigation error correction method for an underwater autonomous vehicle. Before the underwater autonomous vehicle introduces the heading information into the dead reckoning algorithm, the magnetic compass is first compensated for the magnetic field, the magnetic declination angle is corrected, and the error angle is installed. Correction, and then introduce the corrected heading information into the dead reckoning after being smoothed by αβ filtering; at the same time, the DVL installation error angular velocity coefficient is calculated by the least square method, and then these two sets of parameters are fed back to the output speed information for correction, and finally the corrected The speed information is introduced into the dead reckoning after being smoothed by αβ filtering, which specifically includes the following steps:
[0094] S3-1. Obtain the heading provided by the magnetic compass;
[0095] S3-2. Calculate the error according ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



