Buoyancy compensation control method for AUV (autonomous underwater vehicle) in deep submergence motion
A technology for compensating control and buoyancy, applied in motor vehicles, transportation and packaging, ships, etc., can solve the problems of increasing the AUV's fixed-depth sailing resistance, the error between the AUV's sailing depth and the commanded depth, and increasing energy consumption, so as to improve maneuverability and Control accuracy, eliminate trim angle deviation, increase the effect of sailing time
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0021] The following examples describe the present invention in more detail.
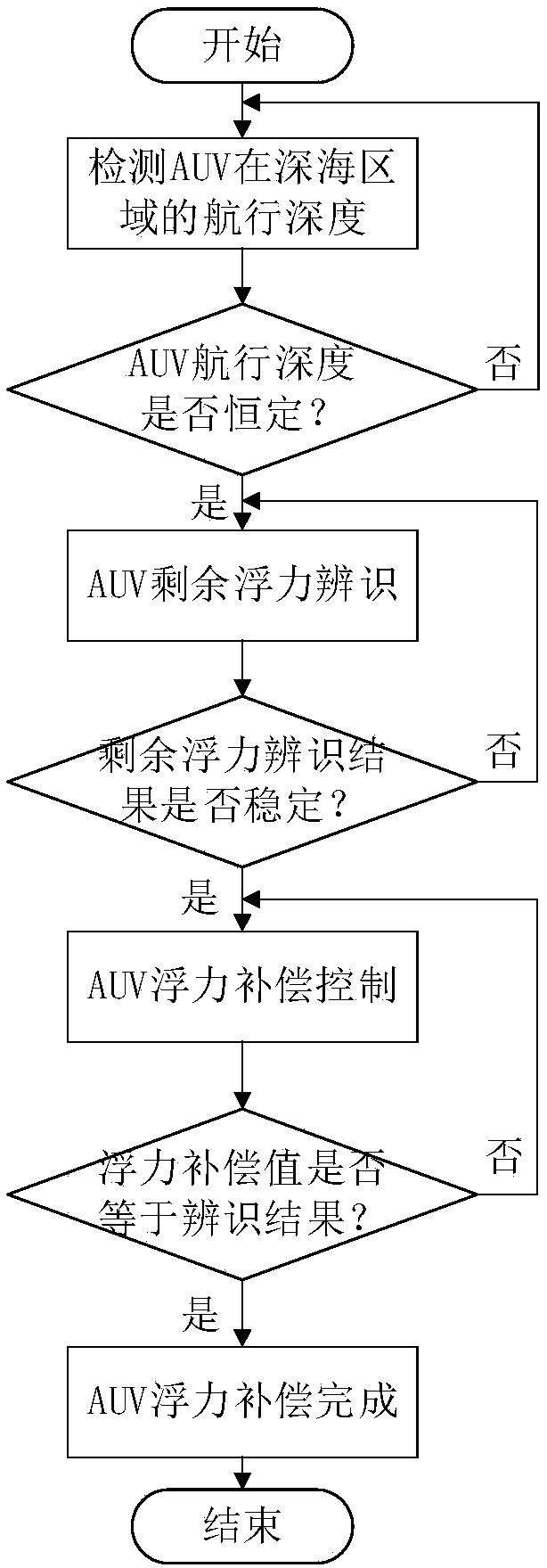
[0022] combine figure 1 , the buoyancy compensation control method of the AUV large submerged deep motion of the present invention mainly includes the following steps:
[0023] Step 1: Use the depth sensor carried by the AUV to detect the depth of the AUV when it is sailing in the deep sea;
[0024] Step 2: When the AUV's navigation depth in the deep sea area is stable, use the AUV residual buoyancy identification algorithm to identify the remaining buoyancy of the AUV when it is sailing at a fixed depth in the current deep sea area;
[0025] Step 3: When the identification result of the AUV residual buoyancy identification algorithm is stable, then perform buoyancy compensation on the AUV through the oil bladder buoyancy equalization system; otherwise, continue to identify the residual buoyancy of the AUV when it sails at a fixed depth in the deep sea area;
[0026] Step 4: When the buoyancy comp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More