

Gap and surface difference vision measuring device used in match with robot and method
A visual measurement and robotic technology, applied in measurement devices, optical devices, instruments, etc., can solve problems such as poor data consistency, long measurement time, reading gaps, and flush data errors, and achieve simple and clear operation and detection. Intuitive results and complete image information
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] In order to further illustrate the content of the invention, features and effects of the present invention, the following examples are described in detail as follows:
[0036] It is to be understood that in the description the terms "central", "longitudinal", "transverse", "upper", "lower", "front", "rear", "left", "right", "vertical" , "horizontal", "top", "bottom", "inner", "outer" and other indicated orientations or positional relationships are based on the orientations or positional relationships shown in the drawings, and are only for the convenience of describing the present invention and simplifying the description. Nothing is to be construed as indicating or implying that the referred device or element must have a particular orientation, be constructed, or operate in a particular orientation and should not be construed as limiting the invention.
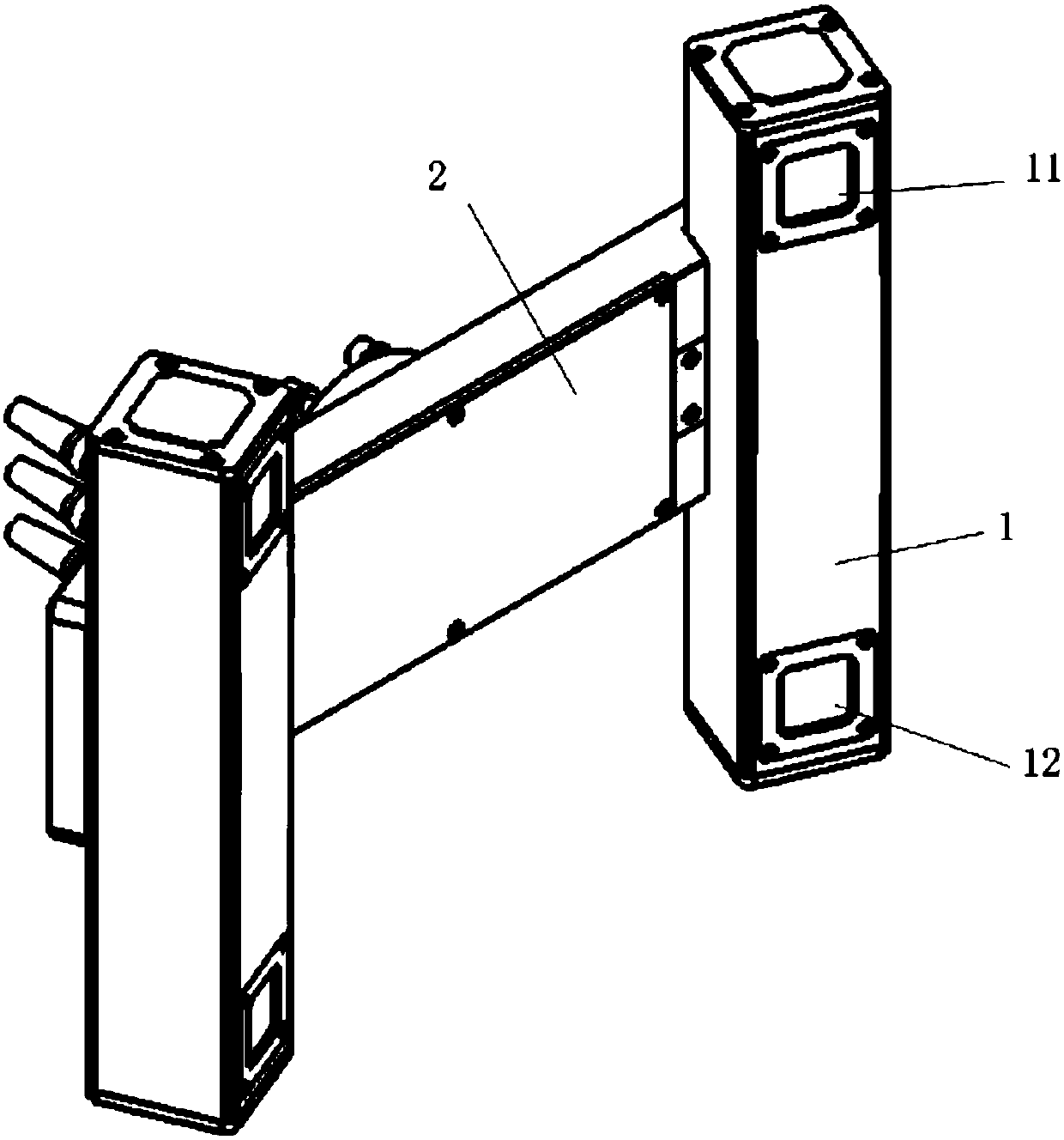
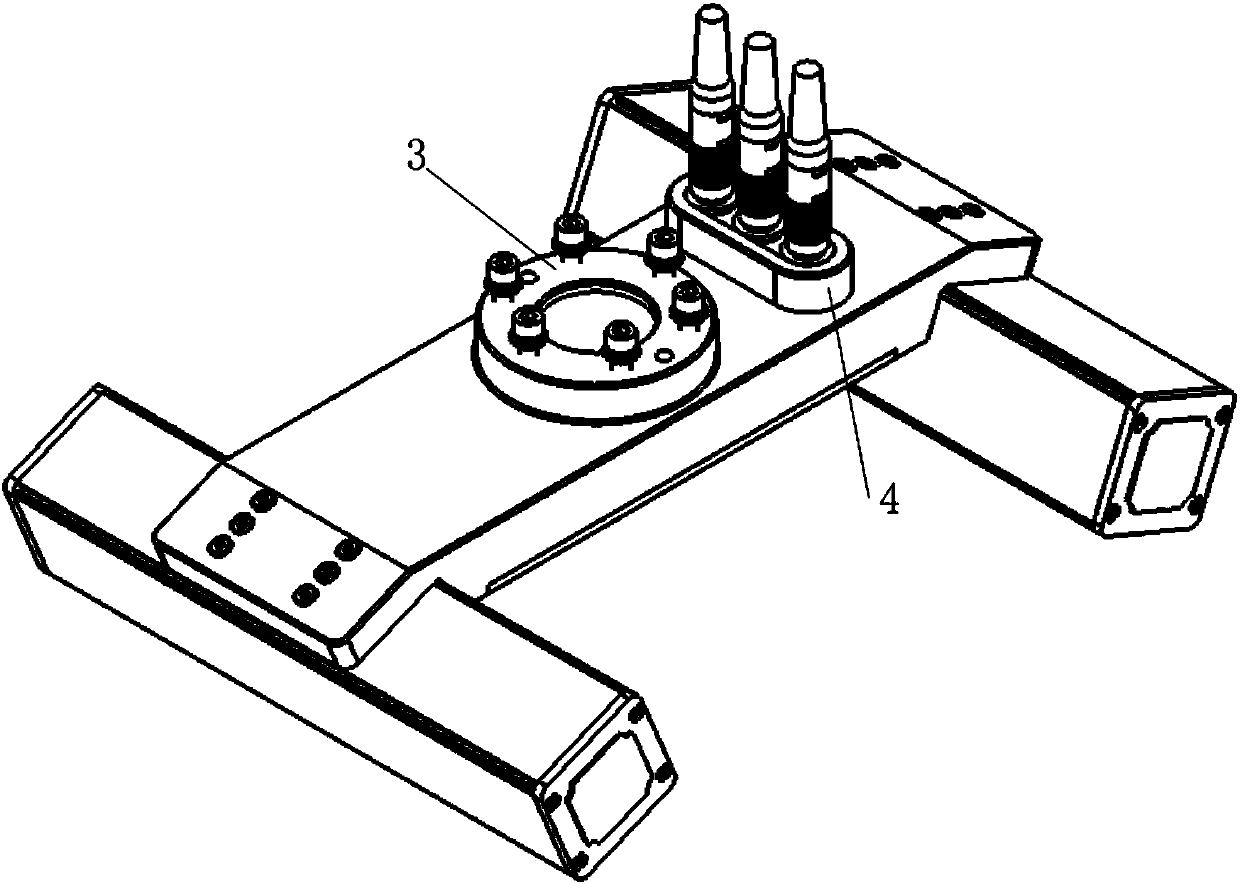
[0037] see figure 1 , figure 2 , The present invention is a gap and surface difference visual measurement device ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More