

Nuclear power station pipeline weld inner wall grinding robot
A technology for nuclear power plants and robots, applied in the field of nuclear power, can solve problems such as hidden quality risks, contaminated pipes, and long distances between nozzles and on-site welding seams, so as to eliminate hidden dangers of unreachable grinding, solve weld stress concentration, and eliminate The effect of weld quality hidden danger
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] In order to make the purpose of the invention, technical solution and beneficial technical effects of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings and specific implementation methods. It should be understood that the specific implementations described in this specification are only for explaining the present invention, not for limiting the present invention.
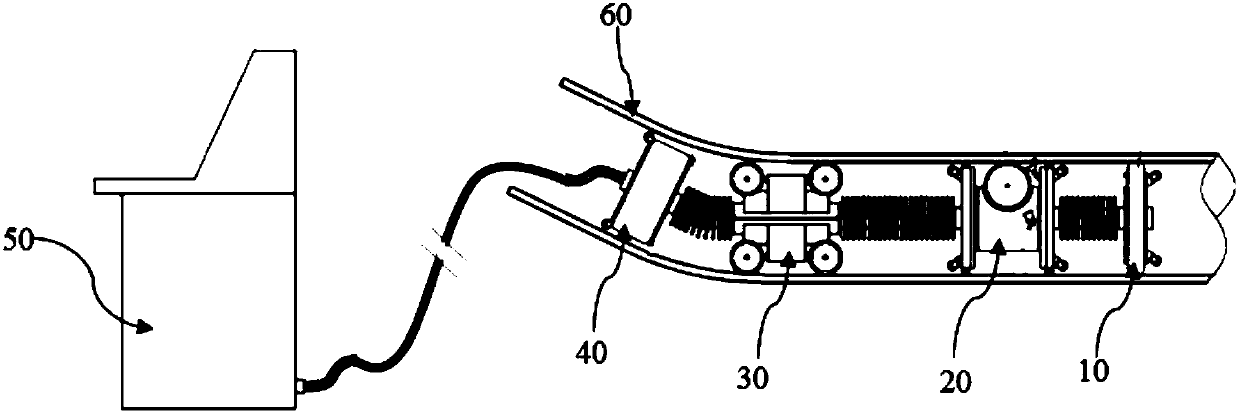
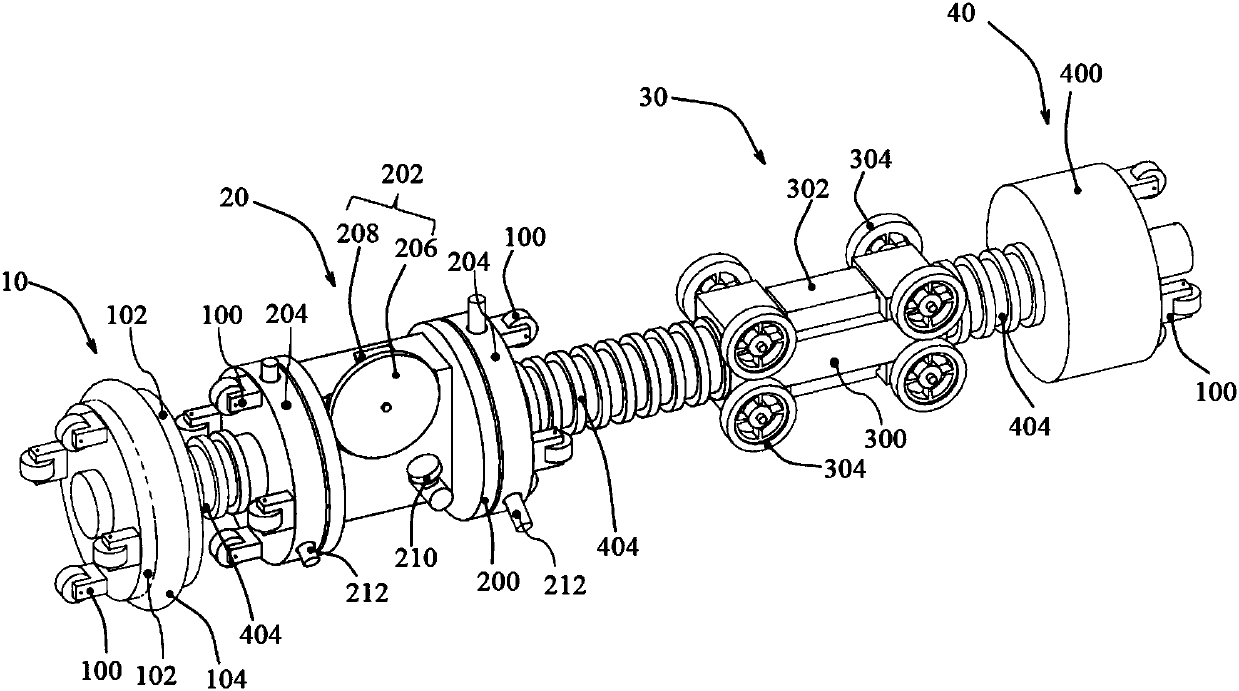
[0032] see figure 1 and figure 2 As shown, the robot for grinding the inner wall of the weld seam of the nuclear power plant pipeline of the present invention includes:
[0033] The sealing unit 10 includes a first round platform 102 and a rubber sealing disc 104 installed on the first round platform 102;
[0034] The polishing unit 20 includes a rotary platform 200 and a polishing device 202 installed on the rotary platform 200;
[0035] The driving unit 30 is used to drive the grinding unit 20 into and out of the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More