Industrial robot rigidity measurement loading device and measurement method thereof
A technology for industrial robots and loading devices, which is applied to measuring devices, testing of machine/structural components, testing of mechanical components, etc. It can solve the problems of cumbersome operation, low measurement efficiency, complex structure, etc. , high precision effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] The technical solutions of the present invention will be further described below in conjunction with the accompanying drawings and through specific implementation methods.
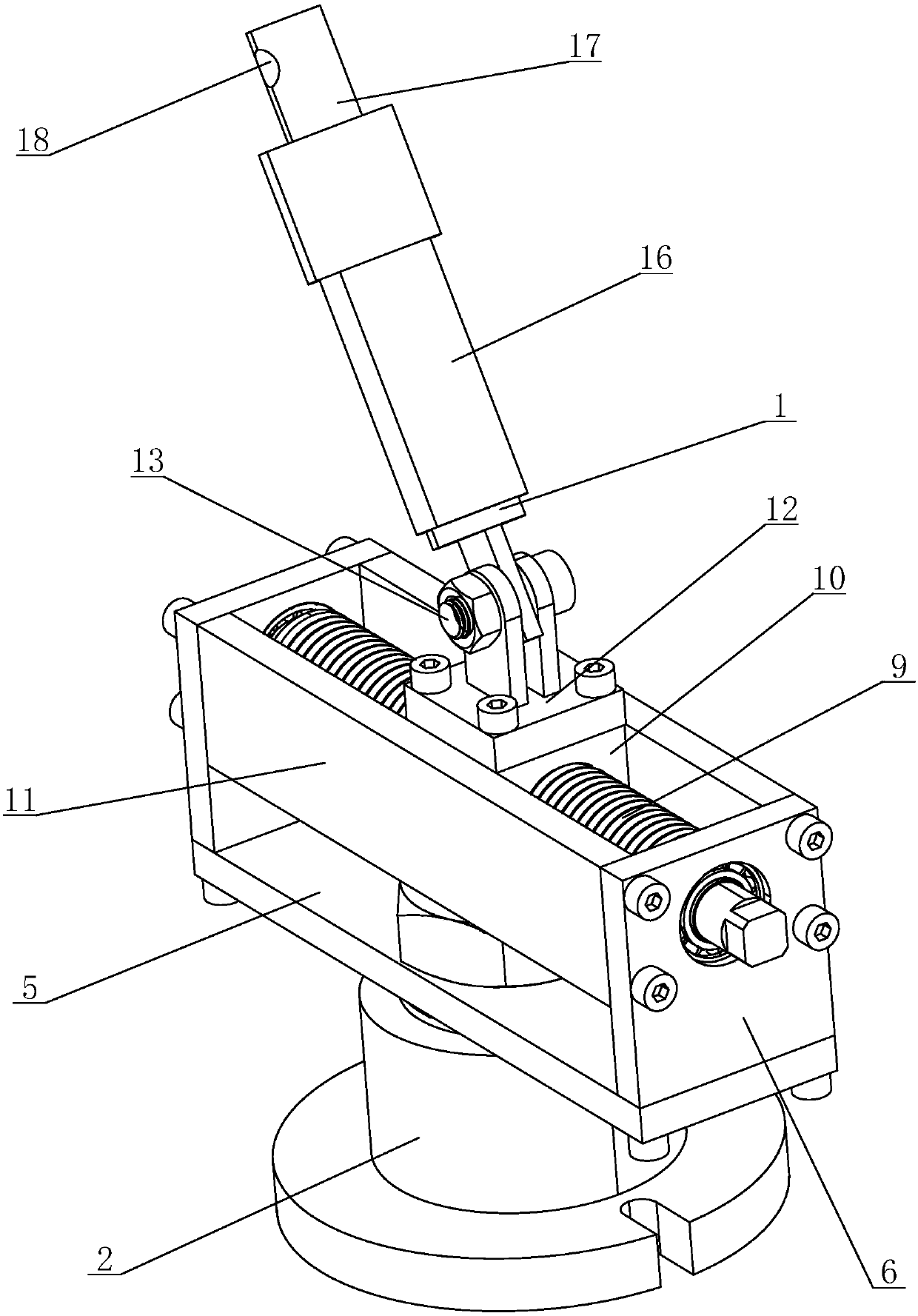
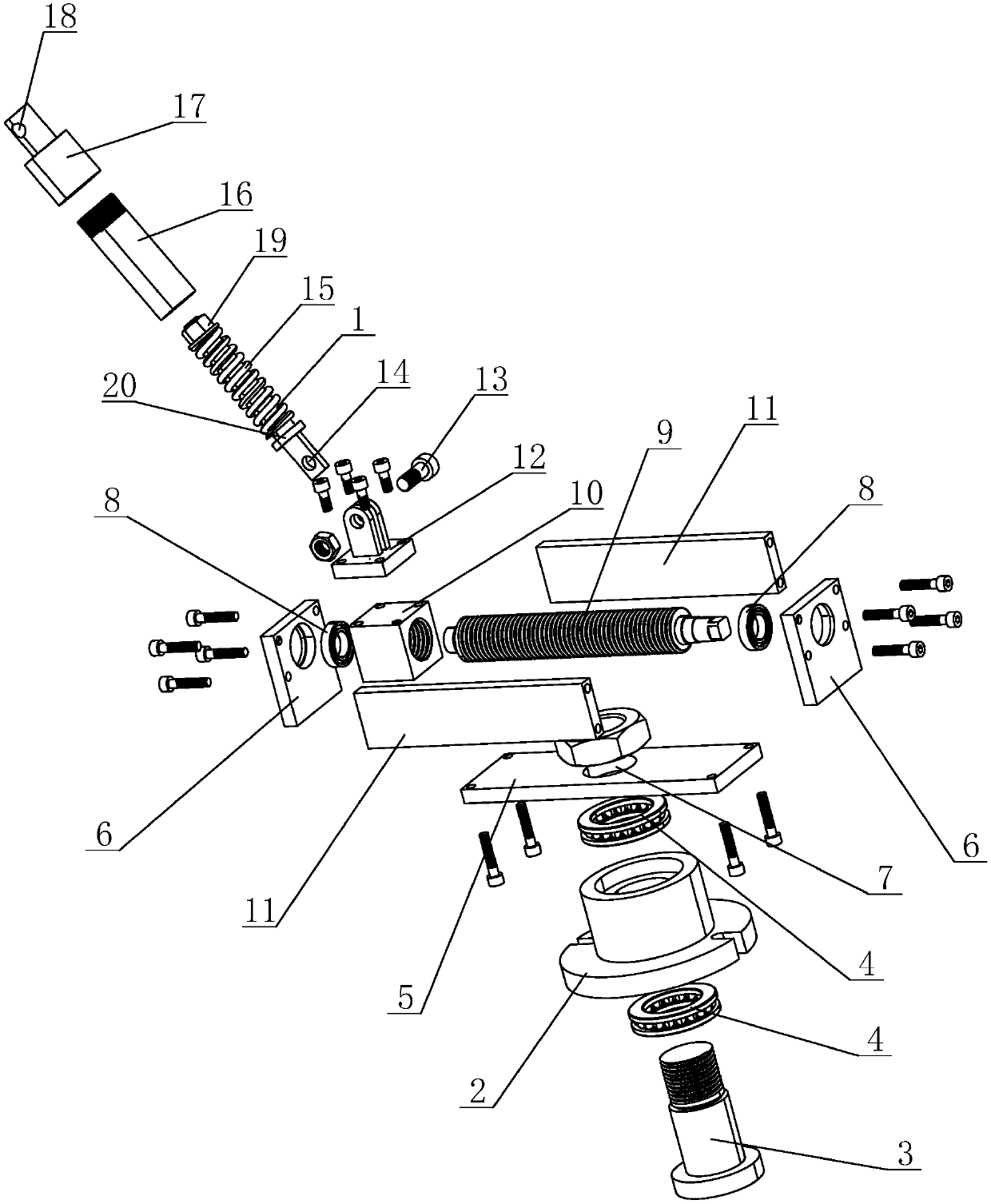
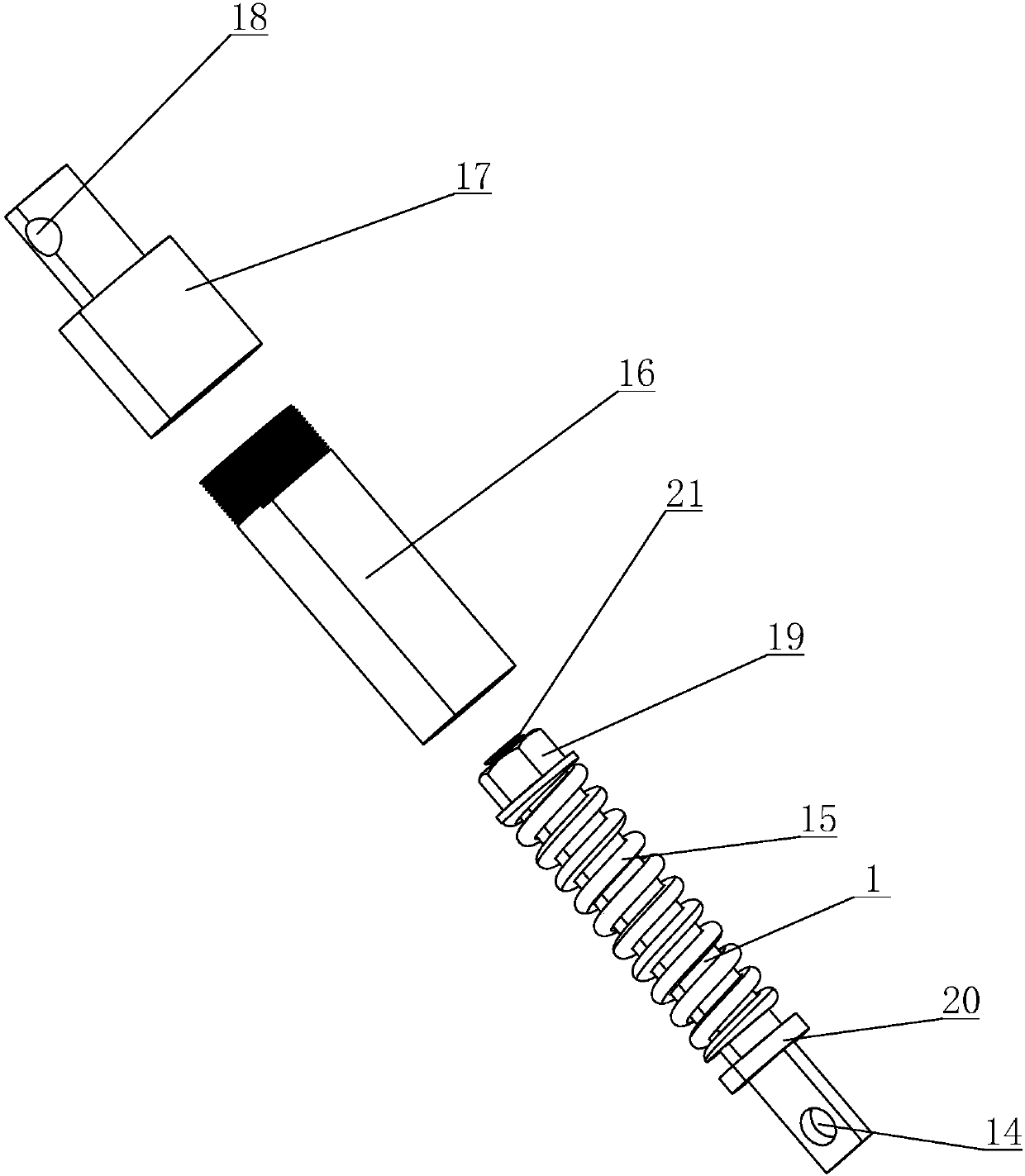
[0037] see Figure 1 to Figure 3 As shown, in this embodiment, an industrial robot stiffness measurement and loading device includes a rotary base, a force transmission base and a connecting rod 1, and the rotary base can freely rotate at any angle along the horizontal plane; it includes a hollow base body 2 and studs 3, the studs 3 pass through the base body 2, thrust bearings 4 are arranged between the two ends of the base body 2 and the studs 3, and the force transmission seat includes a bottom plate 5 and two end plates 6, the two end plates 6 are fixed on the two ends of the base plate 5 by connecting bolts, the base plate 5 is provided with a fixing hole 7, and the upper end of the stud 3 protrudes from the The fixing hole 7 is connected to the base body 2 on the bottom plate 5 through nuts, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com