

Mechanical arm with shearing function for abdominal surgery
A technology for surgical and robotic arms, applied in the field of robotic arms for abdominal surgery, can solve problems such as complex structure of robotic arms, misoperation, and influence on surgical results and progress, to avoid mutual interference and entanglement, improve surgical accuracy, and simple structure Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
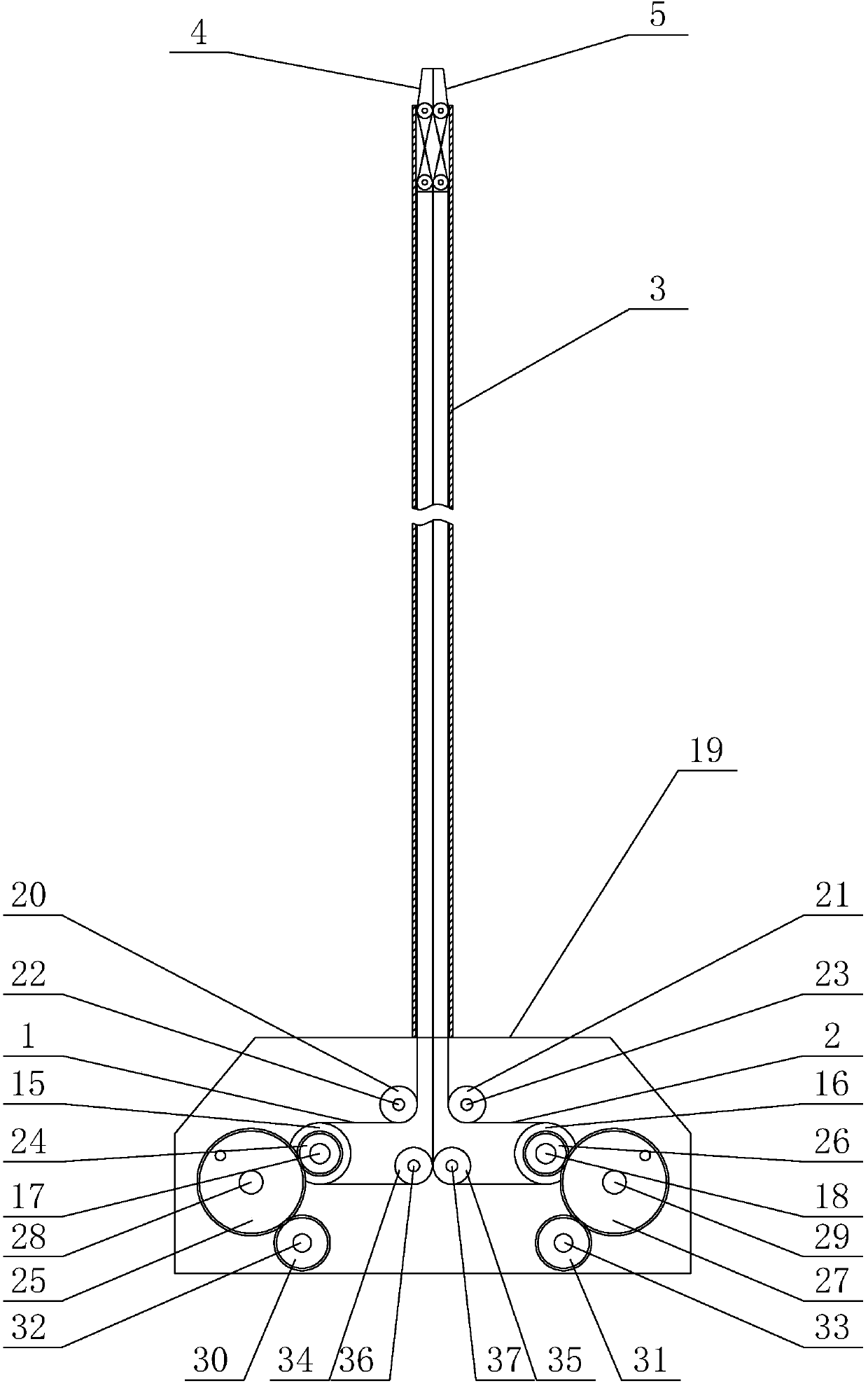
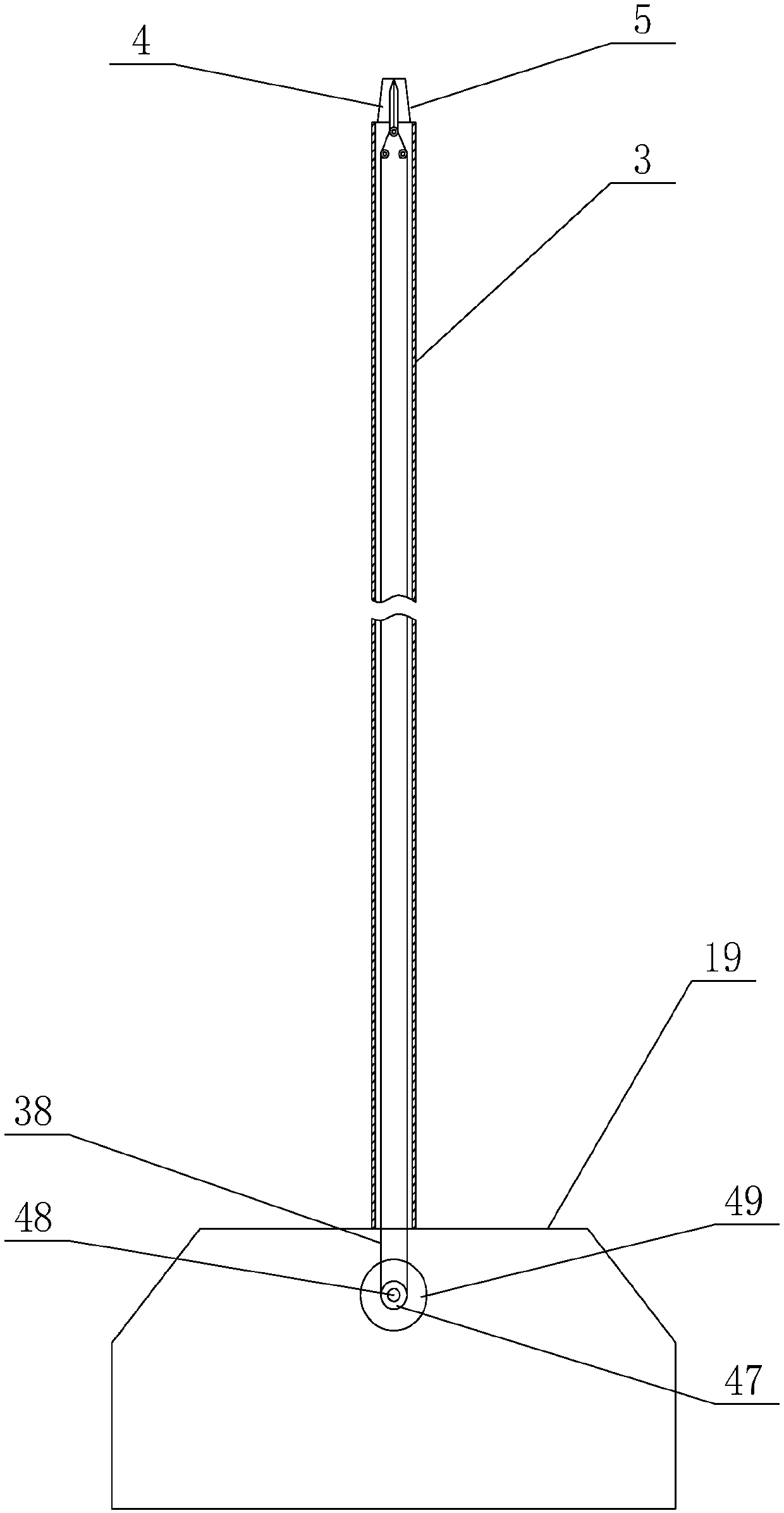
[0020] Specific implementation mode one: combine figure 1 and figure 2 Describe this embodiment. A robotic arm for abdominal surgery with a shearing function described in this embodiment includes a control end mechanism, an execution end mechanism, a first steel wire 1, a second steel wire 2, a hose 3, and a shearing actuator. , a shear control mechanism and a third steel wire 38, the execution end mechanism and the shear execution mechanism are installed at one end of the hose 3, and the control end mechanism and the shear control mechanism are installed at the other end of the hose 3 At one end, the execution end mechanism is connected to the control end mechanism through the first steel wire 1 and the second steel wire 2 , and the shearing actuator is connected to the shearing control mechanism through the third steel wire 38 .
specific Embodiment approach 2
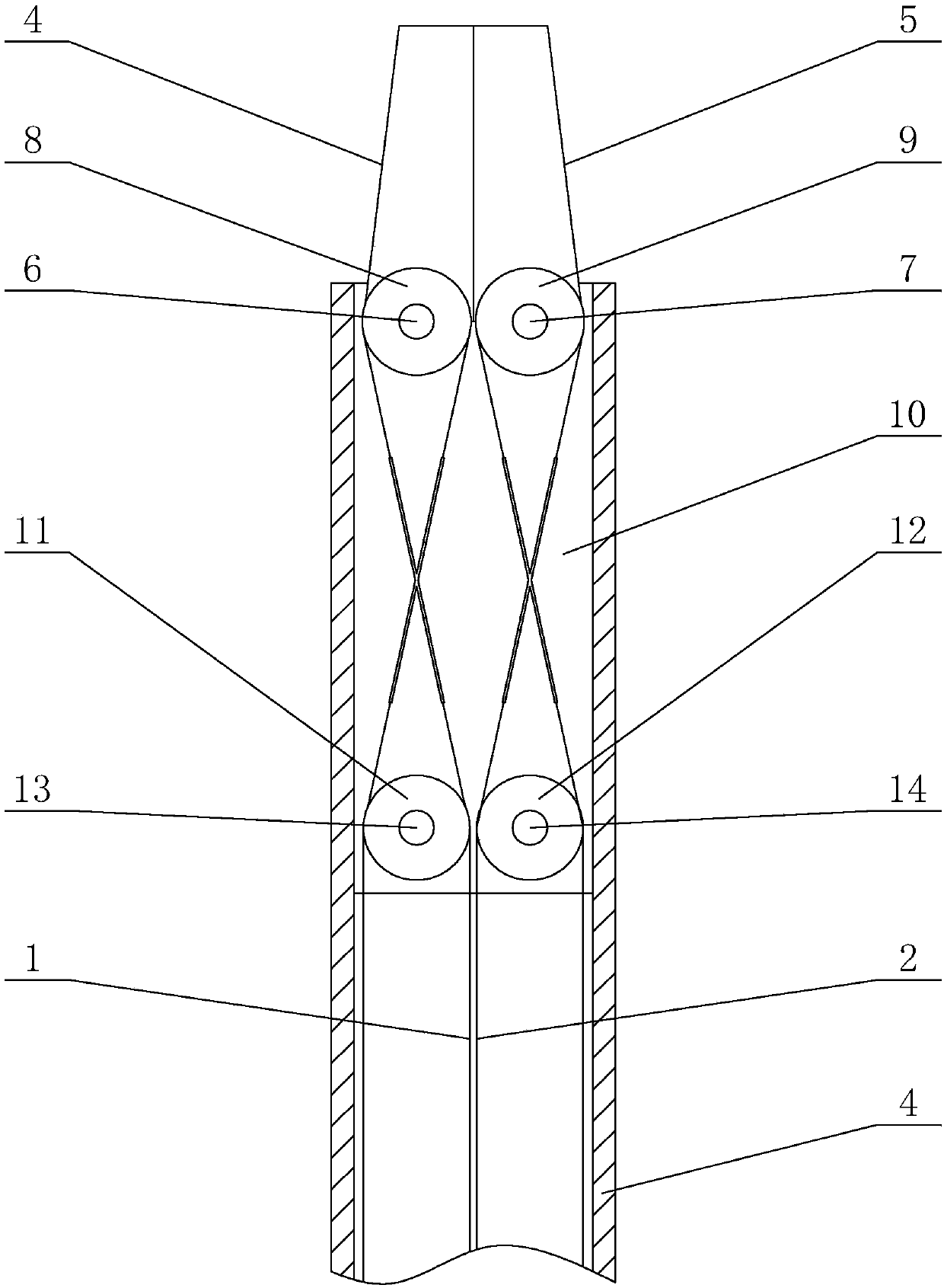
[0021] Specific implementation mode two: combination figure 1 and figure 2 To illustrate this embodiment, the executive end mechanism of a mechanical arm for abdominal surgery with shearing function described in this embodiment includes a left claw 4, a right claw 5, a left claw shaft 6, a right claw shaft 7, a first left claw Steel wire wheel 8, the first right claw steel wire wheel 9 and the execution end base plate 10, the left claw rotating shaft 6 and the right claw rotating shaft 7 are installed side by side on the execution end base plate 10, the lower end of the left claw 4 is sleeved on the first left claw wire wheel 8 On the left claw rotating shaft 6, the lower end of the right claw 5 is sleeved on the right claw rotating shaft 7 through the first right claw steel wire wheel 9, the first left claw steel wire wheel 8 is connected with the control end mechanism through the first steel wire 1, the first right claw The claw steel wire wheel 9 is connected with the con...
specific Embodiment approach 3
[0022] Specific implementation mode three: combination figure 1 and figure 2 To illustrate this embodiment, the executive end mechanism of a mechanical arm for abdominal surgery with shearing function described in this embodiment also includes a left paw guide wheel 11, a right paw guide wheel 12, a left paw guide wheel shaft 13 and a right paw guide wheel. The wheel shaft 14, the left claw guide wheel shaft 13 and the right claw guide wheel shaft 14 are installed side by side on the execution end base plate 10, the left claw guide wheel 11 is set on the left claw guide wheel shaft 13, and the right claw guide wheel 12 is set on the right claw guide wheel shaft 14 , the first steel wire 1 is connected to the control end mechanism through the left claw guide wheel 11 , and the second steel wire 2 is connected to the control end mechanism through the right claw guide wheel 12 . Other components and connections are the same as those in the first embodiment.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More