

Mechanical arm operation control system based on PyQt
An operation control and robotic arm technology, applied in manipulators, program-controlled manipulators, manufacturing tools, etc., can solve the problem of not considering robot simulation and trajectory planning functions to expand the compatibility of multiple types of manipulators, inflexible manipulator control operations, and manipulators. Problems such as poor controller compatibility, to achieve the effect of rich interface functions, expanded functionality, and good compatibility
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in further detail below in conjunction with the accompanying drawings.
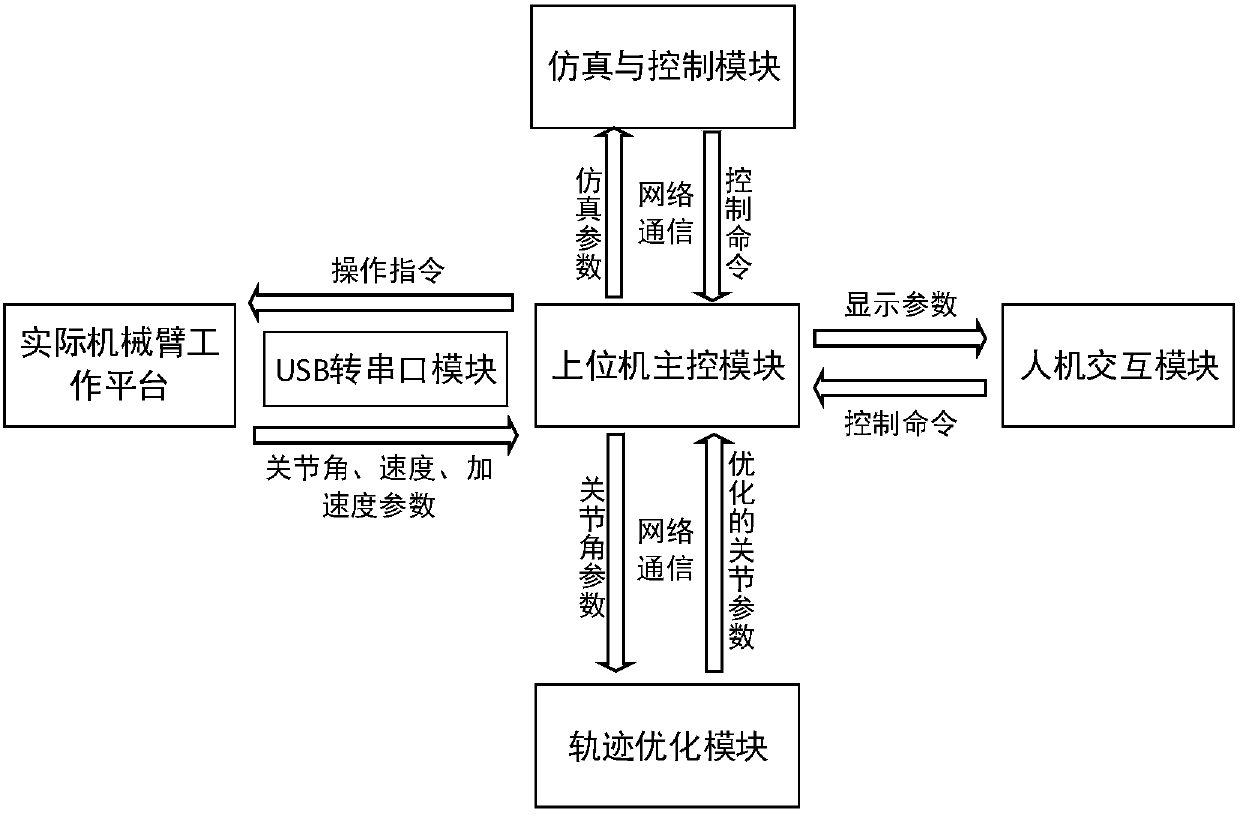
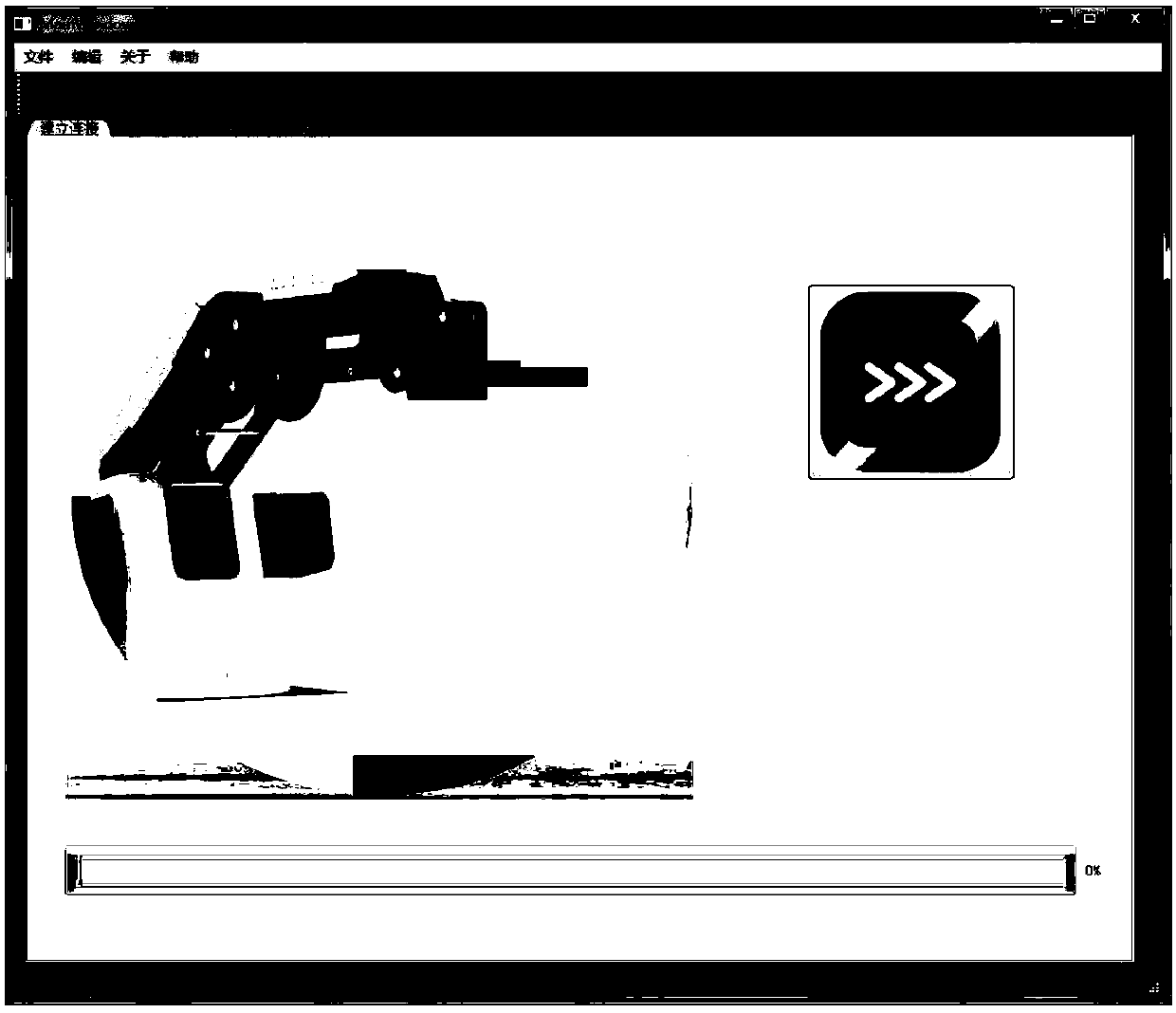
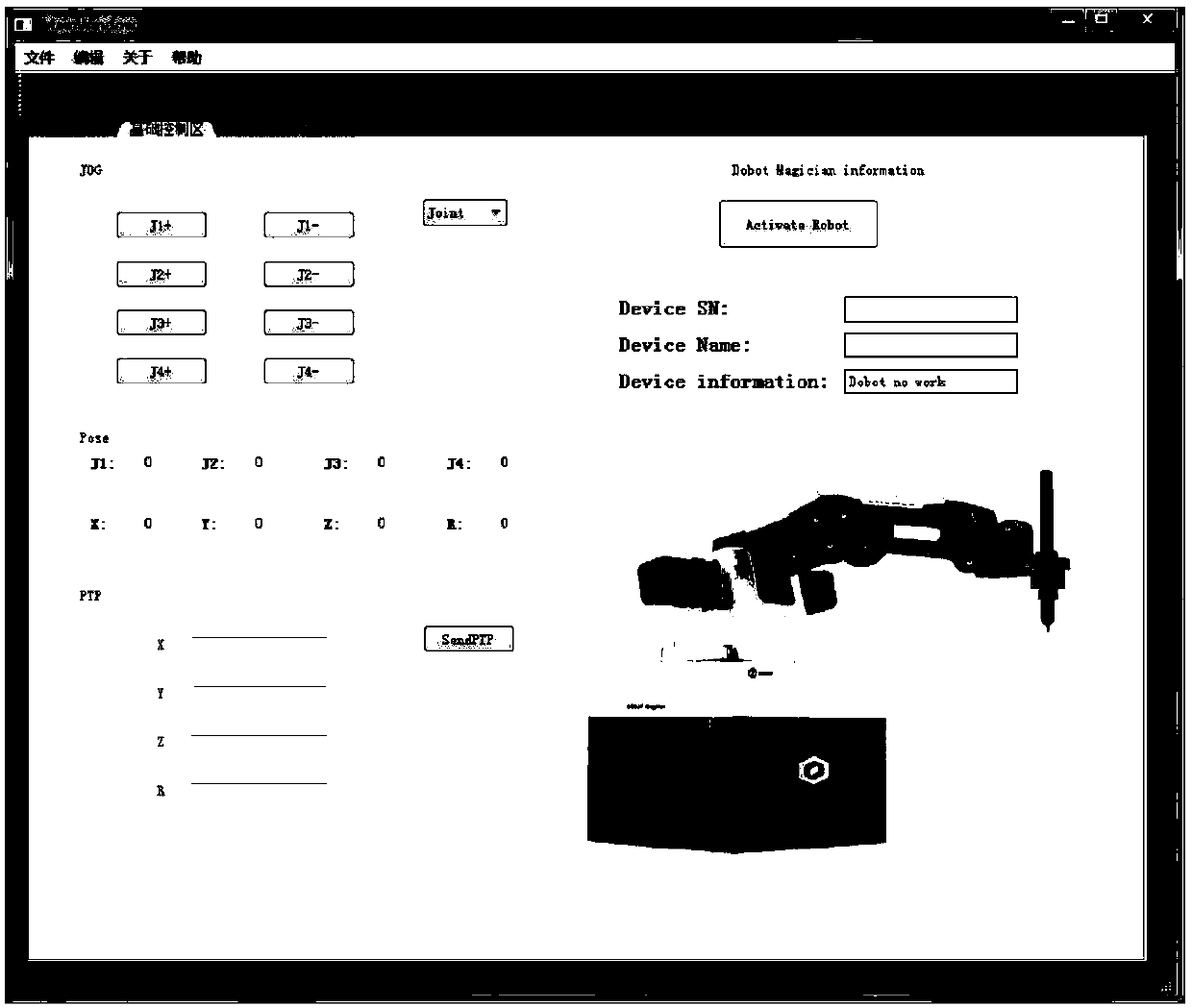
[0043] A PyQt-based manipulator operation control system, the control principle block diagram is as follows figure 1 As shown, the system consists of a human-computer interaction interface module, a host computer main control module, a simulation and control module, a trajectory planning module, and a USB-to-serial port module, a total of five modules. The specific effect of the human-computer interaction module is shown in Figure 2, and its interface consists of three major parts. Including the manipulator connection control interface, the manipulator basic control and related information display interface, the manipulator online teaching and simulation control interface. Each interface is used to control the robotic arm to complete various specific operations and display corresponding operating parameters. image 3 It shows the display effect of the manip...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More