

Humanoid robot leg mechanism
A humanoid robot and leg mechanism technology, applied in the field of robotics, can solve problems such as difficult installation, poor structural strength, and heavy weight, and achieve the goals of reducing overall weight and installation errors, reducing the number of uses, and improving processing efficiency and installation speed Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
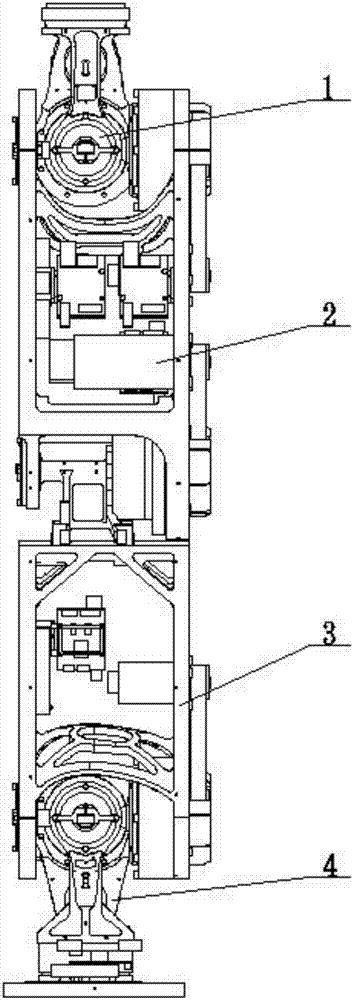
[0026] The humanoid robot leg mechanism of this embodiment 1 includes a thigh mechanism 2, a hip joint mechanism 1 is threadedly connected to the upper end of the thigh mechanism 2, and a calf mechanism 3 is threaded to the lower end of the thigh mechanism 2. The lower end of the lower leg mechanism 3 is connected with an ankle joint and a sole mechanism 4 by bolts.
[0027] The hip joint mechanism 1 has two degrees of freedom in YAW and ROLL directions; the thigh mechanism 2 has two degrees of freedom in the upper and lower PITCH directions; the calf mechanism 3 has one degree of freedom in the PITCH direction; The mechanism 4 has one degree of freedom in the ROLL direction; the leg mechanism of the humanoid robot of the present invention can complete the humanoid walking gait movement through the combination of the above six degrees of freedom.
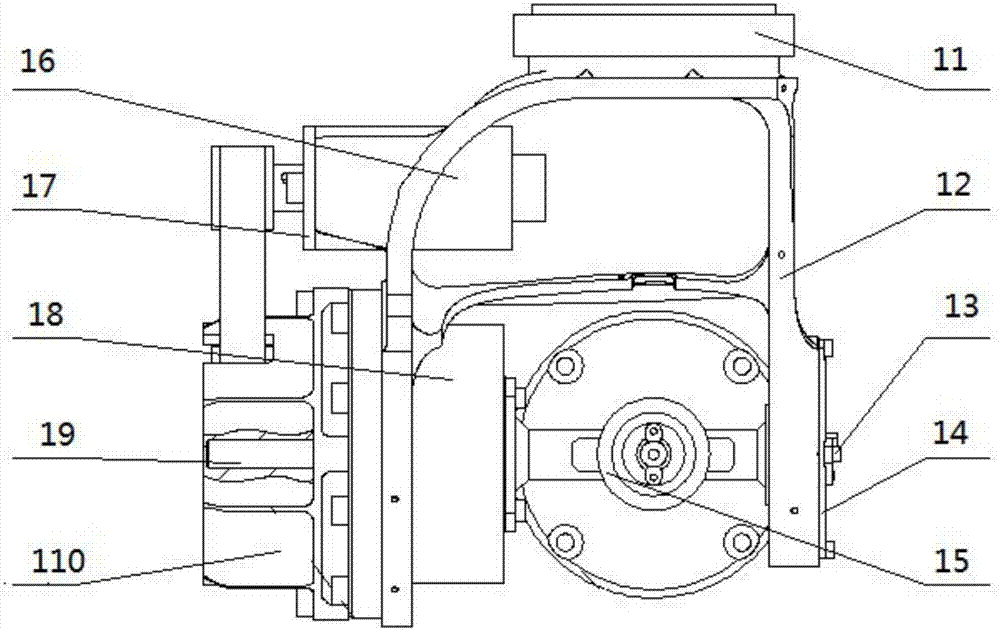
[0028] The hip joint mechanism 1 includes a hip joint U-shaped piece 12, a first harmonic reducer 11 is fixed on the upper end of ...
Embodiment 2
[0031] Further, embodiment 2 adds the following features and connection relations on the basis of embodiment 1:
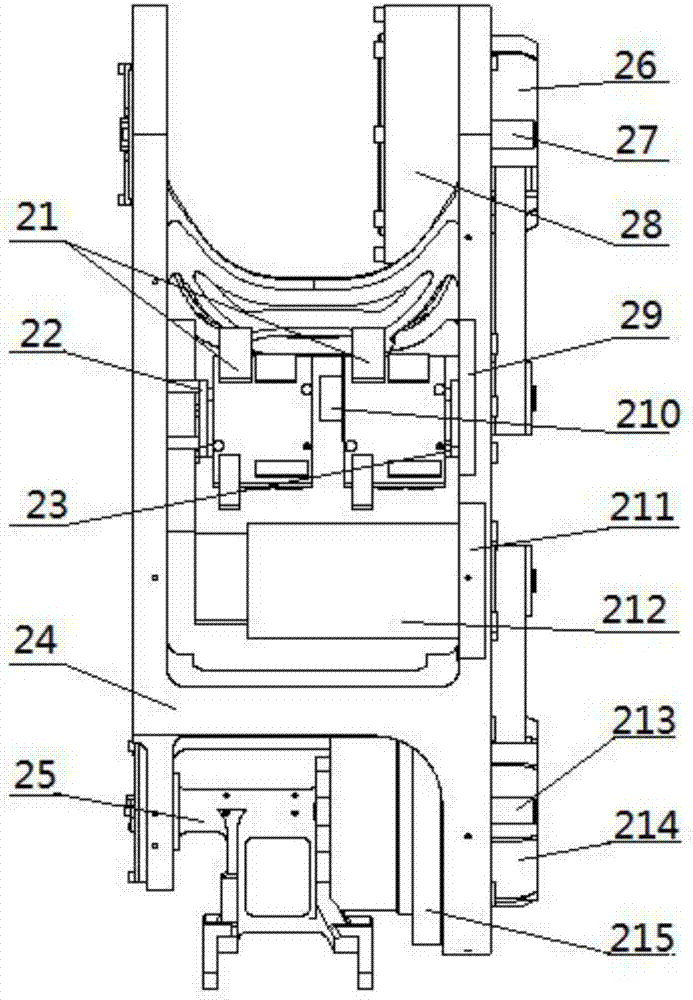
[0032]The thigh mechanism 2 includes a thigh main part 24, a second speed reducer end cover 26 and a third harmonic speed reducer 28 are fixed on the upper part of the thigh main part 24 by bolts, and on one side of the thigh main part 24 A first circuit board support 22 is threaded on the baffle, and a second circuit board support 23 is threaded on the baffle on the other side of the thigh main part 24. The first circuit board support 22 and the second circuit board support Both circuit board brackets 23 are fixed with a motor drive circuit board 21 by bolts, and a second speed reducer shaft 27 is fixed by bolts along the axial direction of the third harmonic speed reducer 28 at its end. The other end of the speed reducer shaft 27 extends into the bearing arranged on the second speed reducer end cover 26, and the first thigh driving motor 210 is fixed on the inner...
Embodiment 3
[0036] Further, embodiment 3 adds the following features and connection relations on the basis of embodiment 2:
[0037] The shank mechanism 3 includes a shank main part 31 on which a shank driving motor 32 is fixed by bolts. In Embodiment 3, one degree of freedom can be realized through the lower leg drive motor 32 .
[0038] The ankle joint and sole mechanism 4 includes a sole plate 45, a torque sensor 43 and a third circuit board support 44 are fixed on the upper end of the sole plate 45 by bolts, and an ankle joint is fixed on the upper end of the torque sensor 43 by bolts. U-shaped piece 42, a first bearing end cover 411 is threadedly connected to one side of the upper part of the ankle joint U-shaped piece 42, and a second encoder 41 is fixed on the outer wall of the first bearing end cover 411 by bolts On the other side of the upper part of the ankle joint U-shaped part 42, a fifth harmonic reducer 410 is fixed by bolts, and one end of the fourth reducer shaft 48 in th...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More