RGB-D visual-odometer method based on Census transformation and local-graph optimization
A visual odometry and partial map technology, applied in the field of computer vision, can solve problems such as scale drift, can only be used indoors, and the range of depth measurement is limited, so as to improve robustness and accuracy, and solve the lack of depth information , Optimizing the effect of estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with accompanying drawing and embodiment, but the embodiment of the present invention is not limited thereto.
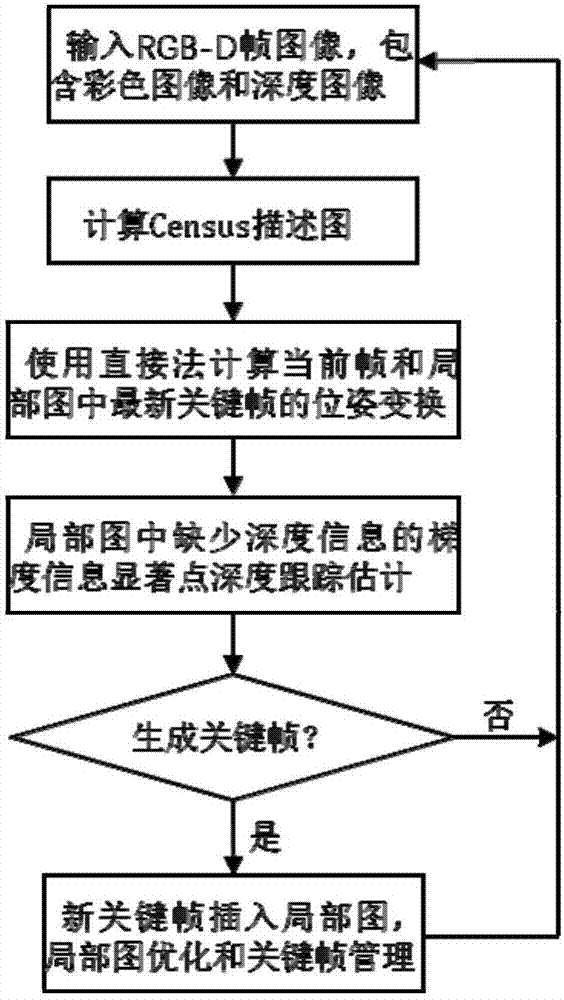
[0043] A RGB-D visual odometry method based on Census transformation and partial graph optimization, such as figure 1 As shown in Figure 2, it includes the following steps:
[0044] S1. Obtain the color and depth image information of the environment through the RGB-D sensor, and use the color image to calculate the Census description map;
[0045] S2. Based on the Census description map, use the direct method to perform motion estimation on the current frame, and calculate the relative pose of the current frame and the latest key frame in the local map;
[0046] S3. For points with significant gradient information but lack of depth information in the local map, perform depth tracking estimation in the current frame;
[0047] S4. According to the pose estimation result of the current frame, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com