

Aircraft pose estimation method based on direct method and inertial navigation integration
A pose estimation and aircraft technology, applied in the field of aircraft positioning, can solve the problems that the inertial measurement unit cannot accurately measure the drift acceleration of the aircraft, large cumulative errors, and autonomous positioning errors of the aircraft
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
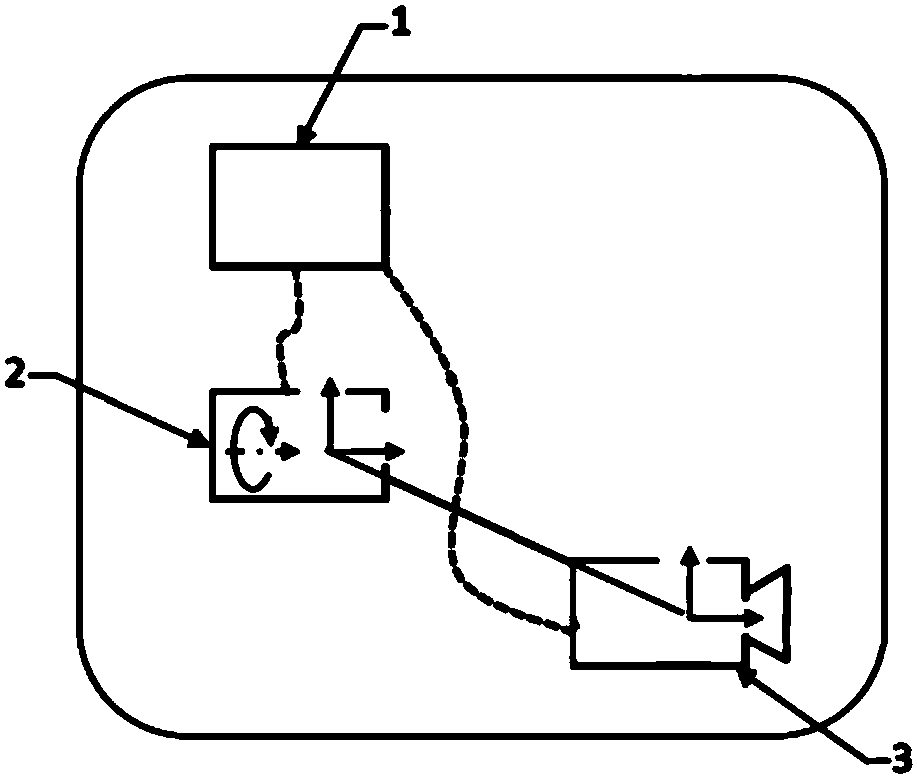
[0100] Such as figure 1 Shown is the hardware architecture schematic diagram of the present invention, is made up of microprocessor (NUC) 1, inertial measurement unit (IMU) 2 and camera 3, and inertial measurement unit (IMU) 2 and camera 3 are all connected with microprocessor (NUC) 1 connected.
[0101] The microprocessor adopts Intel's NUC (NUC5i7RYH) series, and the weight of the whole machine is only 0.607Kg. The processor has the advantages of small size, multiple interfaces, fast processing speed, powerful function, low power consumption, and fast heat dissipation. The main application background of the present invention is the motion pose estimation of the aircraft, and the main algorithm relies on the fast processing of images, so this NUC5i7RYH microprocessor is very suitable for the needs of the present invention.
[0102] The inertial measurement element adopts the LPMS series. This series of products of LP-RESEARCH uses advanced data fusion technology to provide u...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More