

Method for simulating takeoff stages of single shot included angle type rocket boosted unmanned aerial vehicles
A simulation method, UAV technology, applied in design optimization/simulation, special data processing applications, instruments, etc., can solve problems such as high sensitivity, unfavorable for guiding flight, and inability to simulate flight conditions
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0033] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
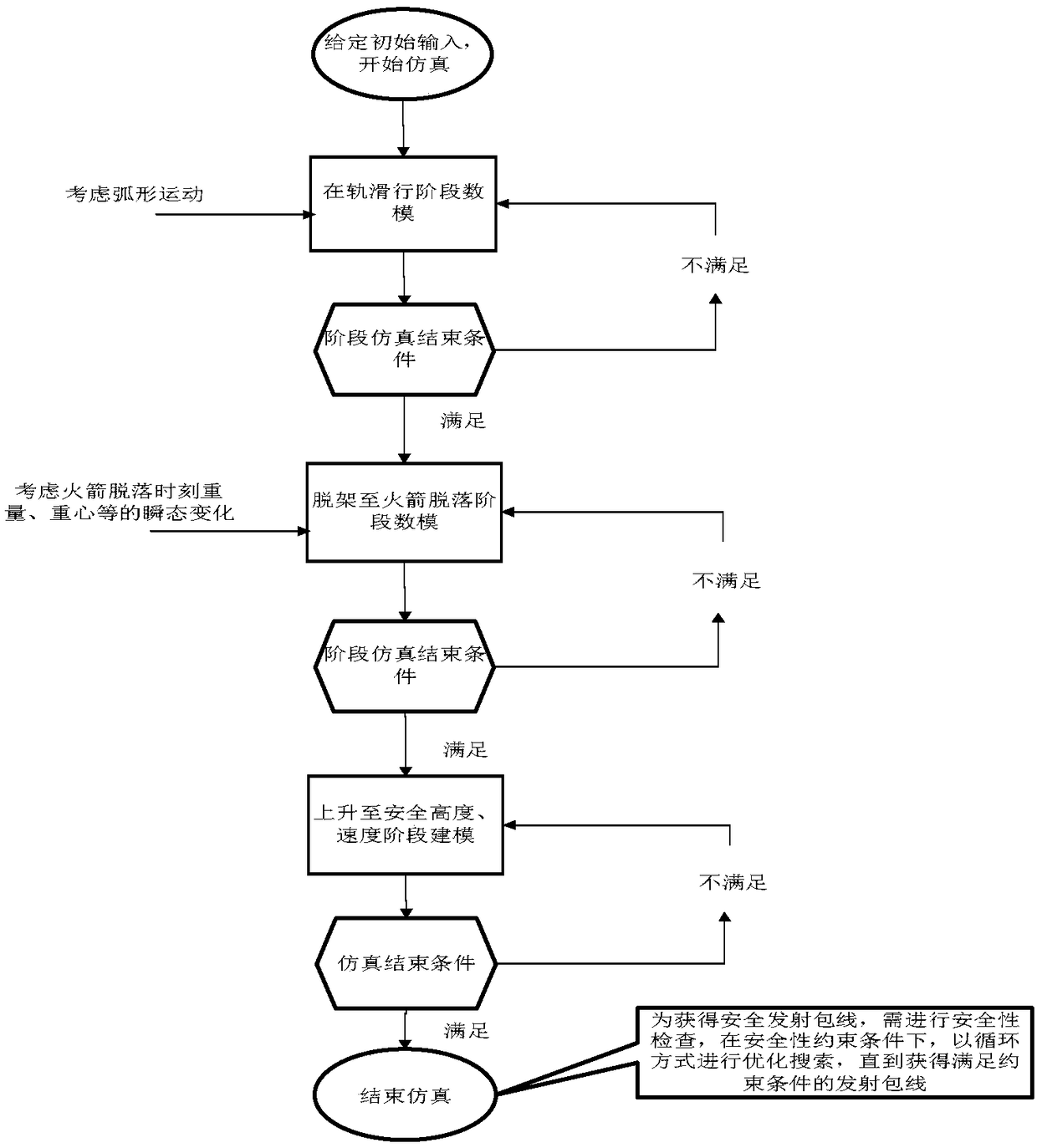
[0034] see figure 1 A simulation method for the take-off stage of a single-engine angled rocket-assisted launch UAV. Firstly, the motion mechanism of the three stages of on-orbit sliding, disengagement to rocket fall-off, and ascent to a safe height and speed flight are analyzed. Determine the force and moment acting on the aircraft at each flight stage, then use the three-state body motion equations to establish a mathematical model, and use the Matlab simulation environment to complete the numerical simulation. The specific steps are as follows:
[0035] 1) On-orbit taxiing stage
[0036] ① At this stage, the aircraft system is composed of the aircraft, the launcher and the rocket booster. Considering the initial input conditions such as the ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More