

High-speed parachute landing system and method for medium-and-small-sized unmanned aerial vehicles and ejection chute
A kind of unmanned aerial vehicle, small and medium-sized technology, applied in the field of high-speed parachute drop system and catapult parachute, can solve the problems of distance deviation, deviation from the predetermined target point, long time of parachute opening process, etc., achieve process controllability, shorten recovery time, The effect of ensuring landing accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0063] The present invention will be described in further detail below in conjunction with the accompanying drawings.
[0064] Design principle of the present invention.
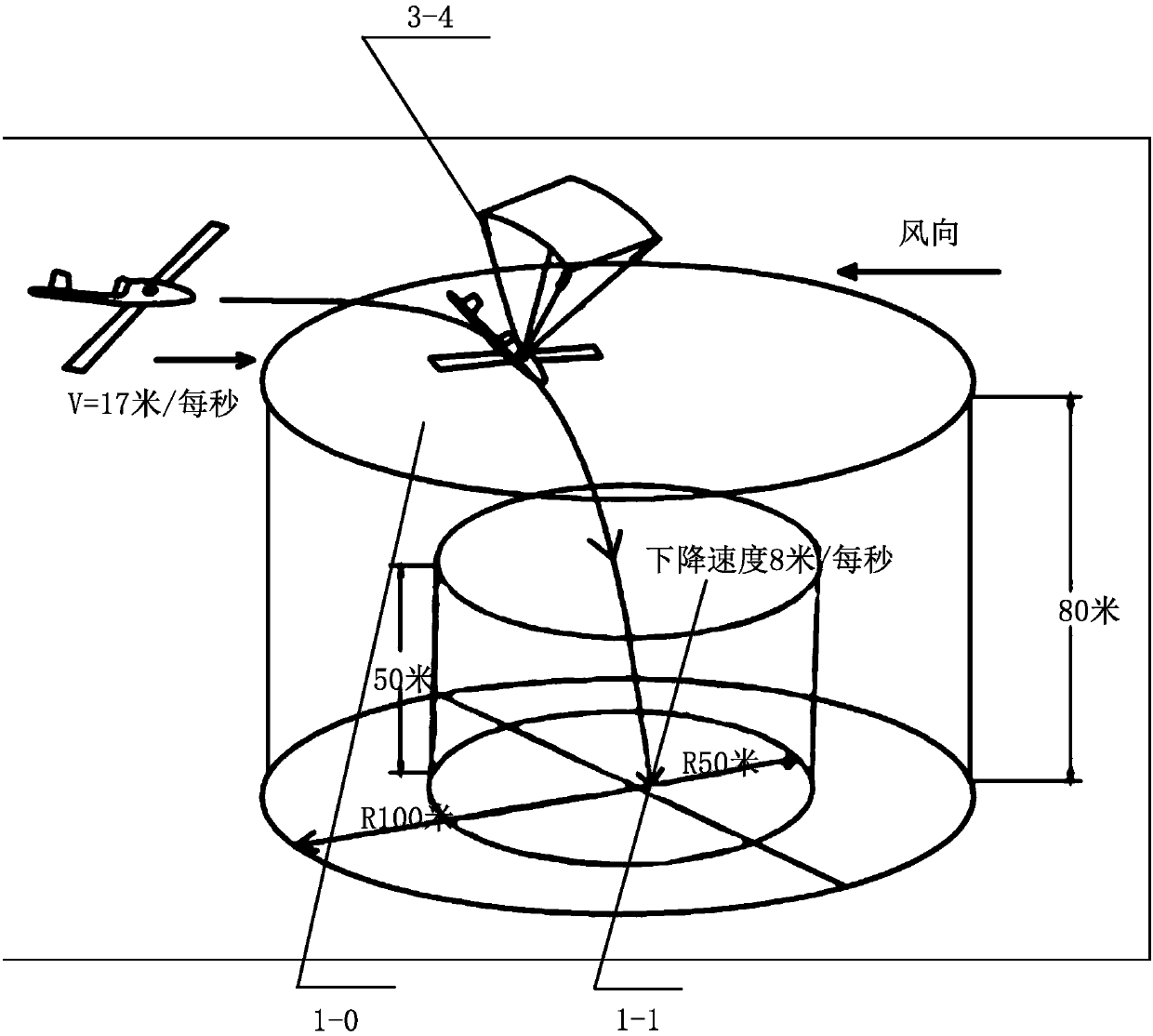
[0065] Such as figure 1 Shown is the principle diagram of the high-precision parachute of the present invention. figure 2 There are two circular areas in the center, from the outside to the inside, there is a pre-entry area with a radius of 100 meters and a height of 80 meters; a parachute opening area with a radius of 50 meters and a height of 50 meters; figure 2 It also indicates the location of the ejection airgun parachute opening: on a circle with a radius of 50 meters at low altitude; it also shows that the forward direction of the ejector and the wind direction are opposite when the parachute is open against the wind; it also indicates that the speed when the parachute is opened is low speed : 8 meters per second, and the speed at which the aircraft enters the pre-entry area is 7 meters per second...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More