

Robot assembly automatic hole searching method based on force feedback
A technology of force feedback and robotics, applied in the direction of manipulators, manufacturing tools, etc., can solve the problems of inability to adapt to the shaft hole gap, low efficiency and non-universal, difficult to meet, etc., to avoid low efficiency and non-universal problems, increase Hole-seeking efficiency and simple calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
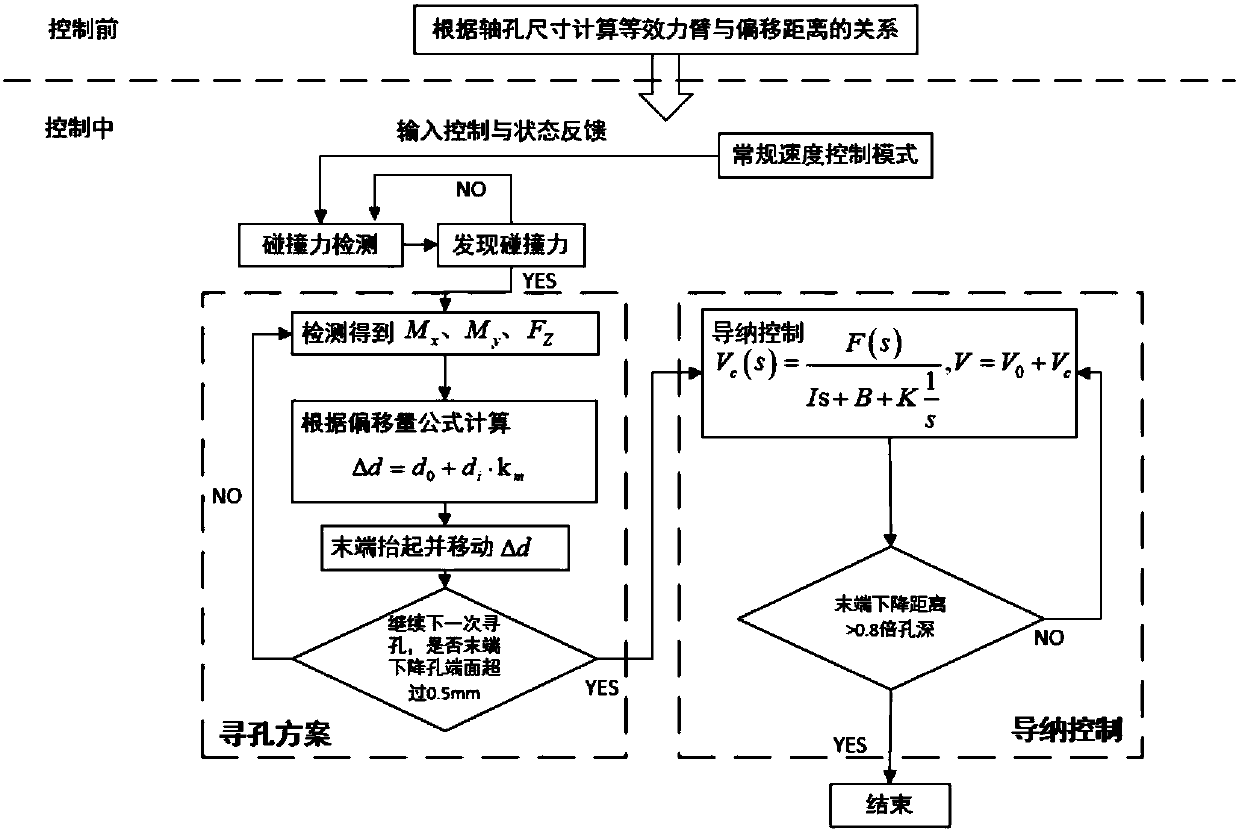
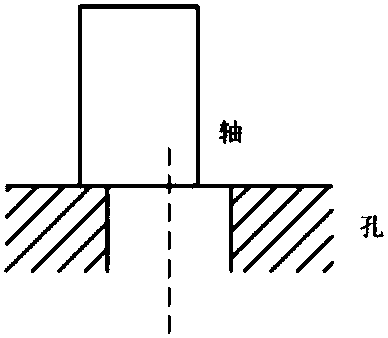
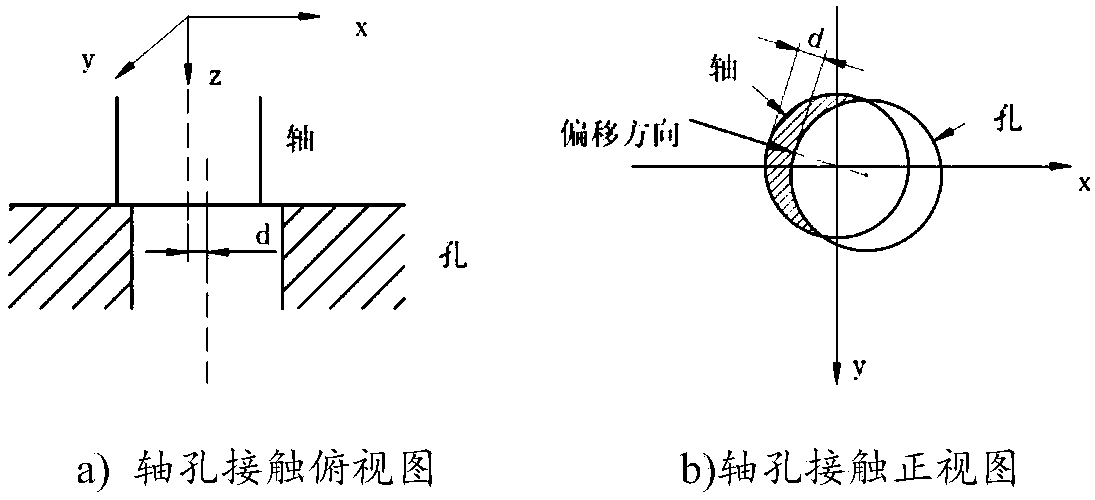
[0031] The invention aims to provide a variable-step-length hole-seeking method based on an equivalent force arm, which is applied to an industrial assembly process, solves the hole centering problem, and accelerates the hole-seeking process. Among them, an automatic hole-finding scheme with variable step length in the process of shaft-hole contact is adopted, combined with offline and online comprehensive calculation methods, and the six-dimensional force sensor information is used to face the inaccurate target position in actual operation. When there is an unknown error in the position of the target point, the axis can be adjusted accordingly according to the direction of the force and the direction of offset, so as to achieve the effect of automatic hole-seeking with variable step length, which has the advantage of speeding up the hole-seeking process, and is suitable for industrial assembly. The hole-seeking process under the imprecise target provides a new practical soluti...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More