

Three-dimensional coordinate positioning method based on machine vision
A technology of three-dimensional coordinates and positioning method, applied in instruments, image data processing, calculation and other directions, can solve the problems of high computational complexity, can not meet industrial real-time requirements and other problems, achieve high matching accuracy, accurate workpiece depth information extraction, fast The effect of matching speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0019] The present invention will be described in more detail and complete below in conjunction with the accompanying drawings and specific embodiments. It should be understood that the specific embodiments described here are only used to explain the present invention, but not to limit the present invention.
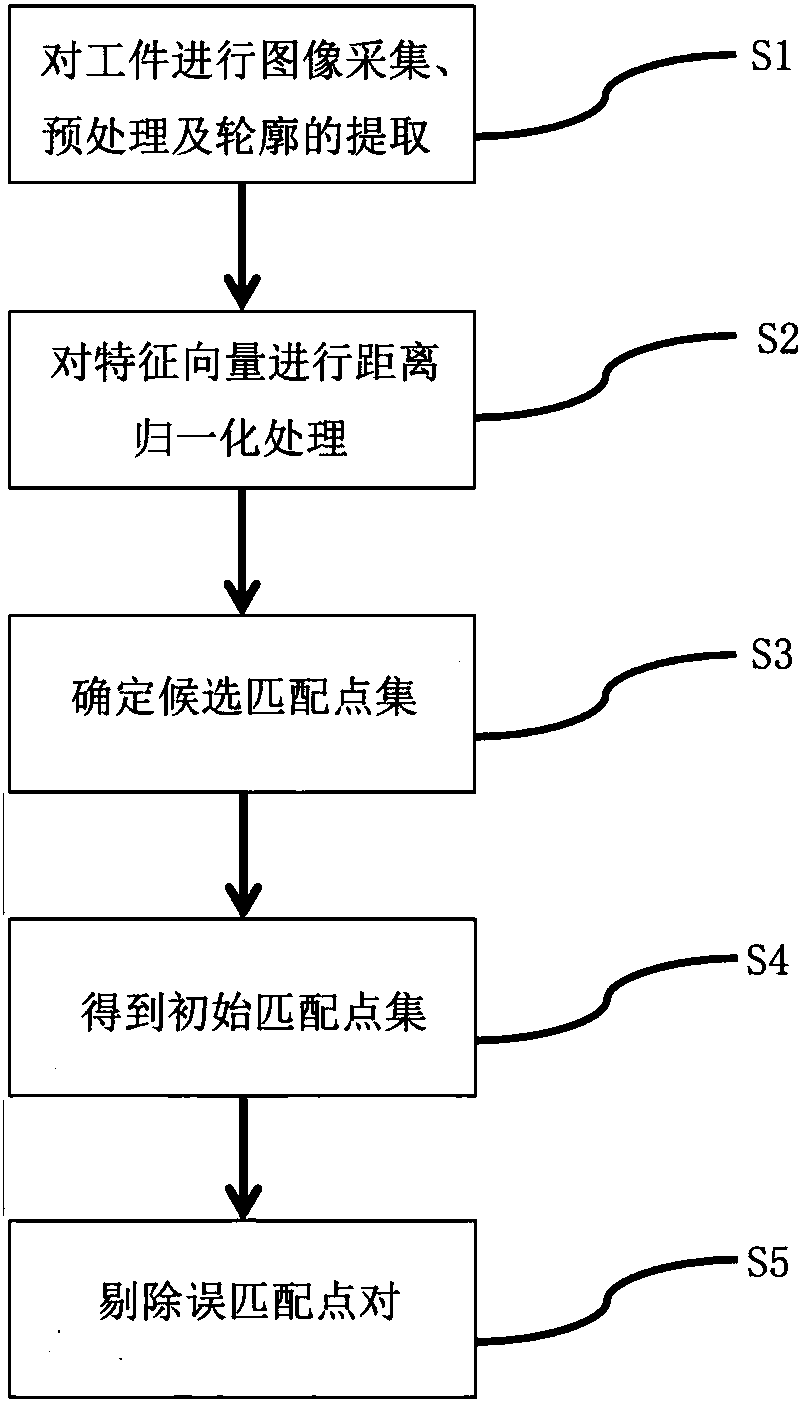
[0020] refer to figure 1 , a kind of three-dimensional coordinate positioning method based on machine vision of the present invention, described method comprises:
[0021] S1, image acquisition, preprocessing and contour extraction of the workpiece;
[0022] Two self-developed black and white CCD cameras with the same configuration of 640×480 resolution are used to form a binocular vision system, and the workpieces to be inspected are photographed from different angles of view. Dust and other factors will affect the effect of workpiece image acquisition.
[0023] The preprocessing process of the workpiece image is to enhance the area of interest, blur the noise area...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More