

Two-wheel drive type low-speed patrol car system and operating method
A patrol car, wheel drive technology, applied in the field of unmanned patrol car system, can solve the problems of low reliability, traffic accidents, low working frequency, etc., to achieve enhanced anti-interference ability, reduced length and width, and high angular resolution Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0057] The present invention will be further described below.
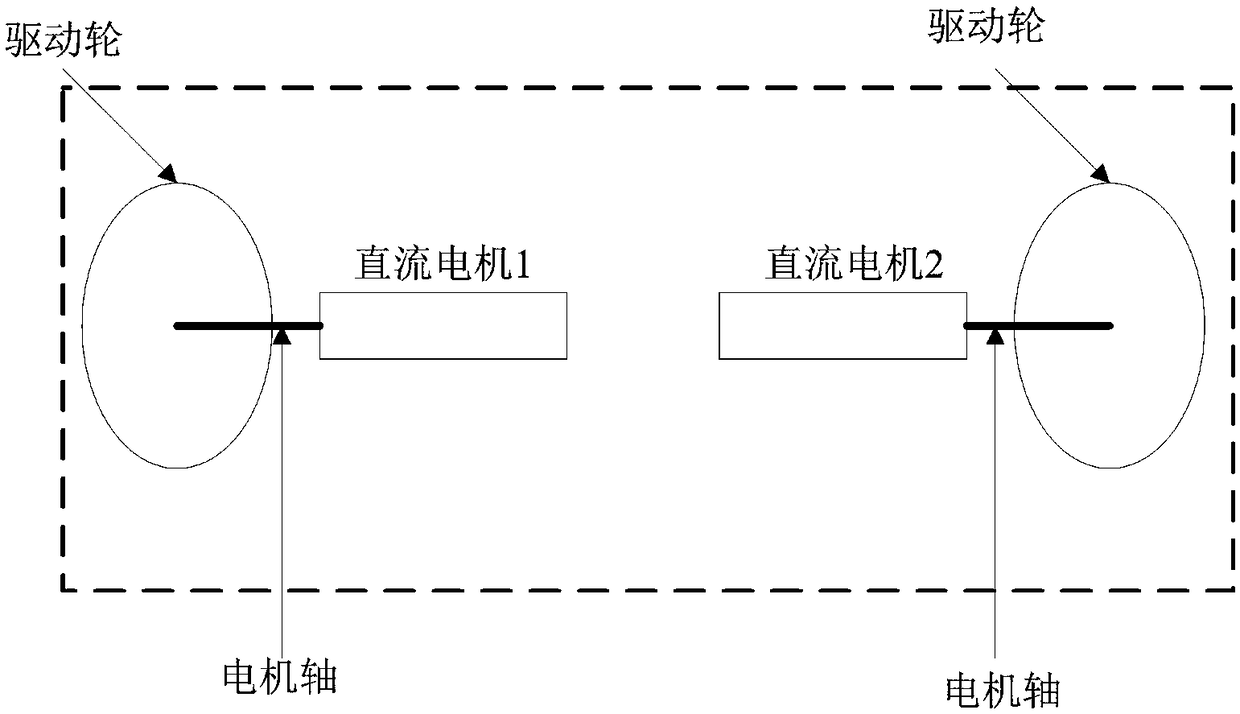
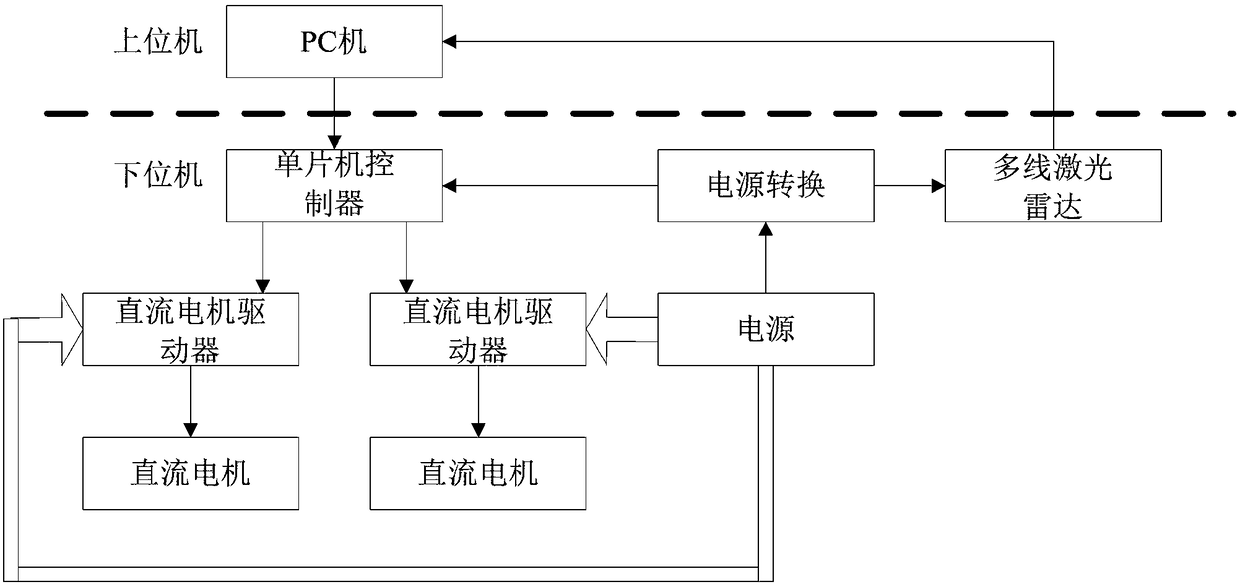
[0058] As shown in the figure, a two-wheel drive low-speed patrol car system includes a two-wheel drive system, a front blind spot detection and obstacle avoidance system, a rear blind spot detection and obstacle avoidance system, an environment detection system and a central control system,
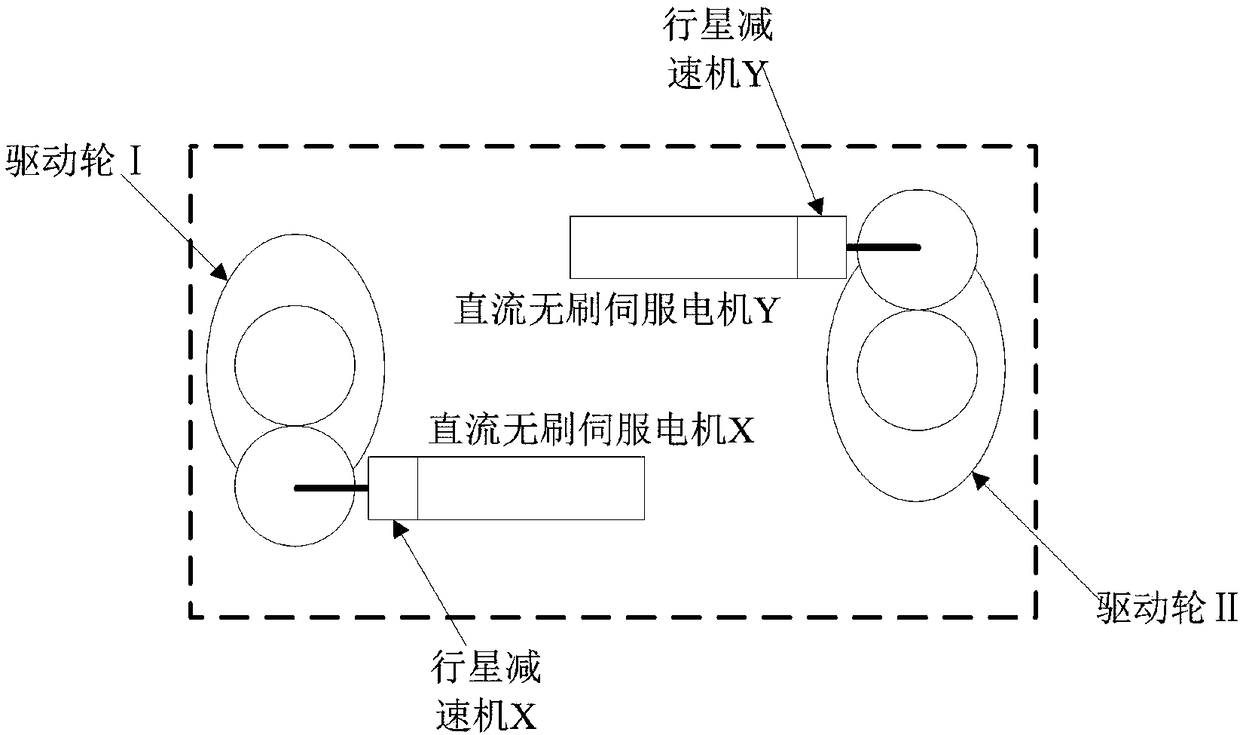
[0059] The two-wheel drive system includes a DC brushless servo motor driver, a DC brushless servo motor X, a planetary reducer X, a DC brushless servo motor Y and a planetary reducer Y, and the DC brushless servo motor driver is connected with the DC brushless servo motor respectively. The motor X is connected to the DC brushless servo motor Y, the DC brushless servo motor X is connected to the input end of the planetary reducer X, the output end of the planetary reducer X is connected to the drive wheel I, and the DC brushless servo motor Y is connected to the planetary reducer X. The input end of the reducer Y is connecte...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More