

Bionic wheeling-walking peristaltic soft-body robot
A technology of robots and bionic wheels, applied in motor vehicles, transportation and packaging, etc., can solve the problems of lack of stability, flexibility and environmental adaptability, limited crawling speed of soft crawling robots, limited space movement ability, etc., to achieve high flexibility The effect of high performance, simple structure and light body weight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
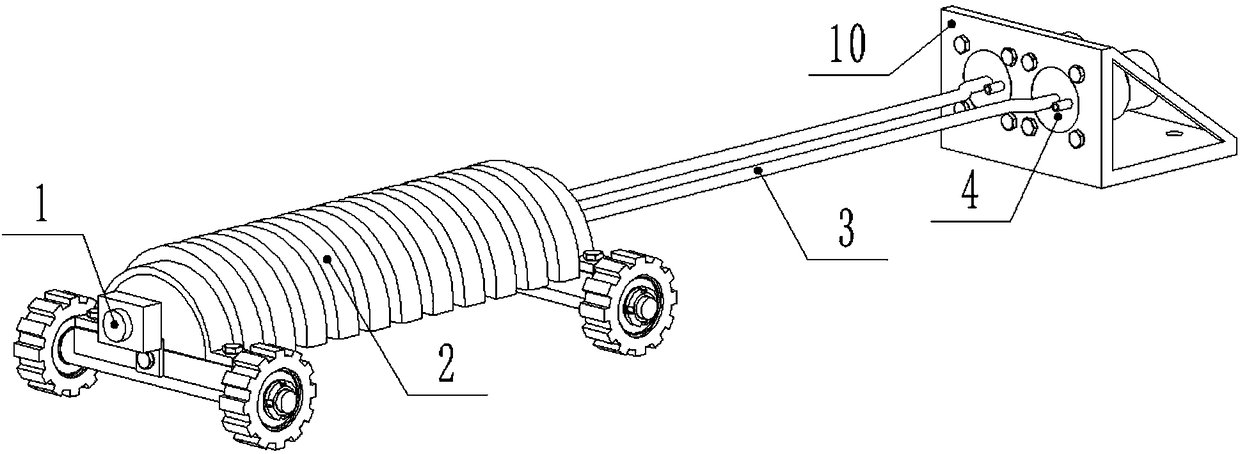
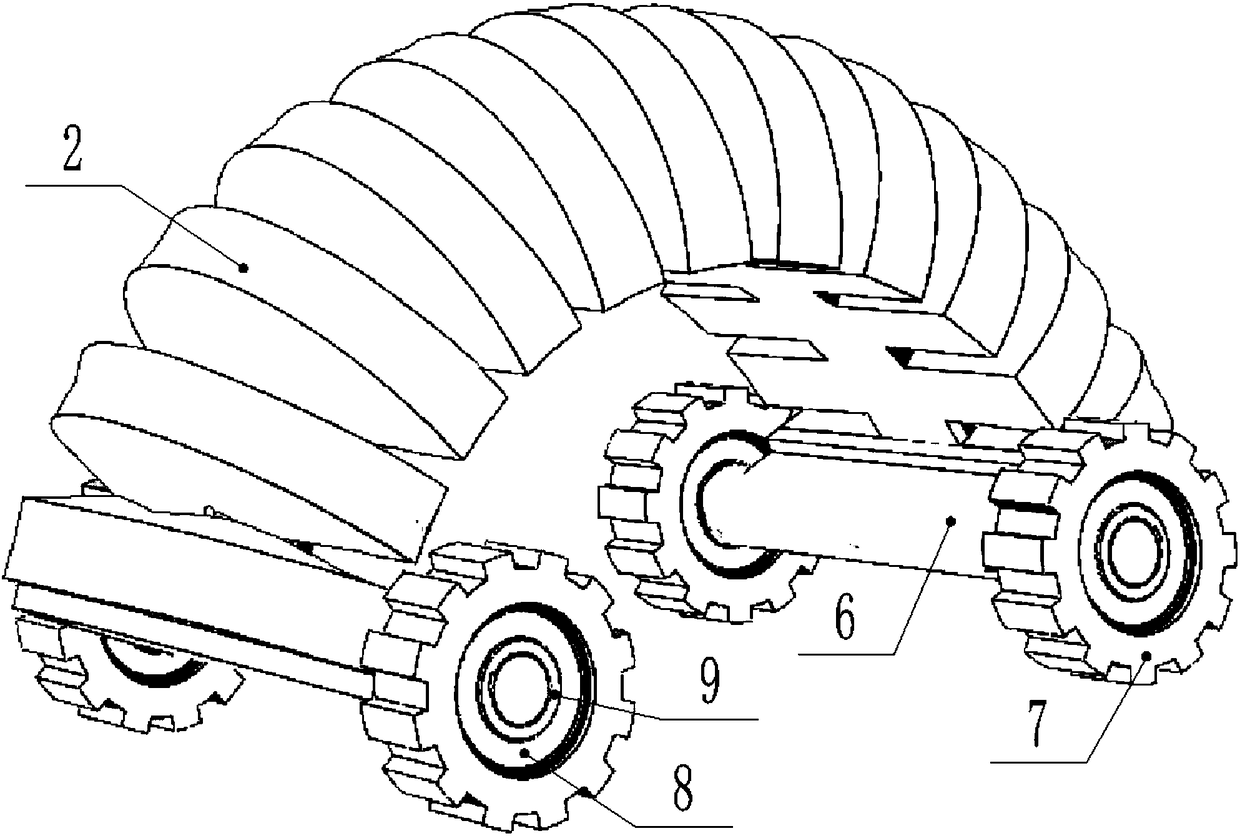
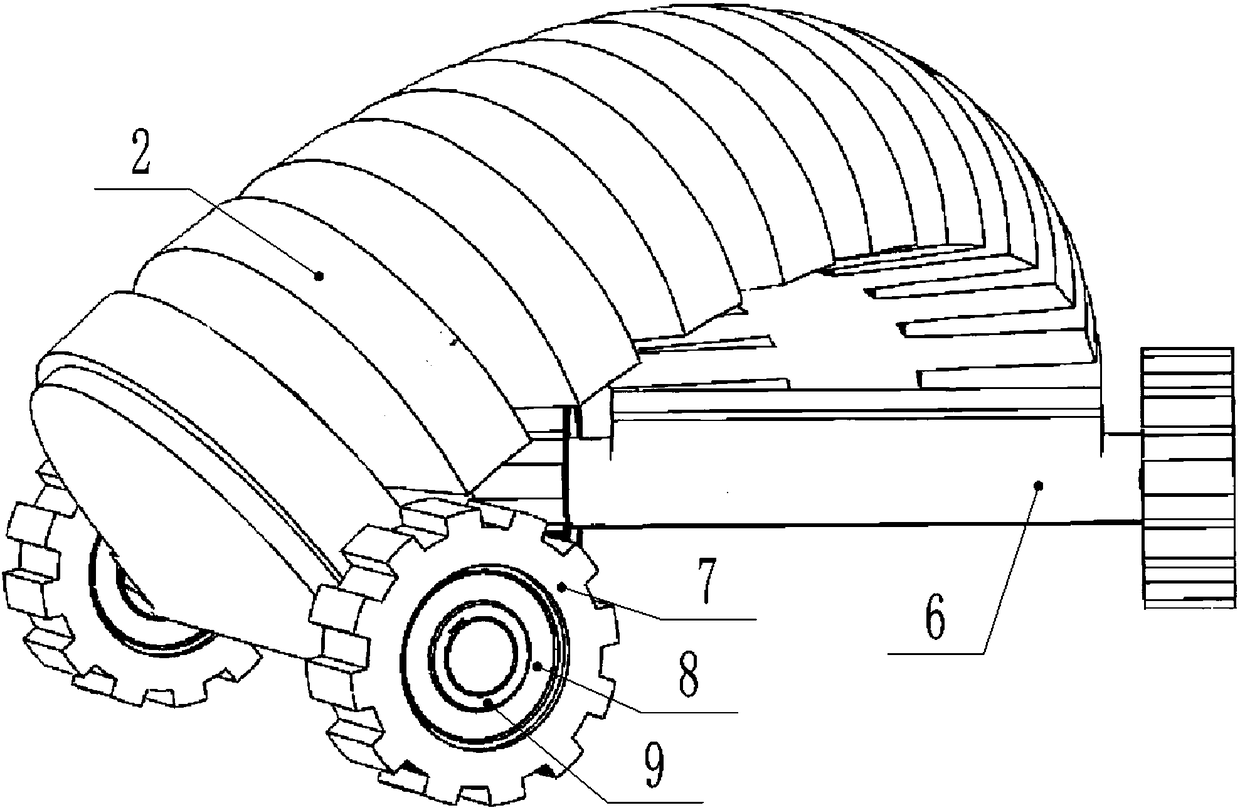
[0019] exist figure 1 In the three-dimensional schematic diagram of the bionic wheel-footed peristaltic soft robot shown, the present invention mainly includes: a soft body base 2, a walking mechanism, a driving mechanism and an end effector 1 camera. Among them, the soft body is a pleated structure composed of several air cavities connected by step-by-step pouring of flexible silicone rubber in the mold, such as Figure 4 , Figure 5 and Figure 6 As shown, its single air cavity is a semicircle composed of two arc-shaped sides of two semi-circular plates connected with two arc-shaped sides of the same arc-shaped plate, and at the same time, two straight sides of the two semi-circular plates are connected with the same flat plate, that is, the bottom plate. Shaped hollow closed shell. A lower semicircular through hole coaxial with the two semicircular plates of each air cavity is provided. In the hollow closed shell, there is a partition plate passing its axis, which not o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More