Method and device for conveying micro-component on liquid surface based on magnetic drive microrobot
A micro-robot, liquid surface technology, applied in the directions of micro-manipulators, manipulators, chucks, etc., can solve the problems of inability to complete micro-components on the liquid surface with high precision, no reliability and high efficiency, uncomfortable micro-components, etc., and achieves simple structure, simple and reliable control. , the effect of small size
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0029] The present invention is described in more detail below in conjunction with accompanying drawing example:
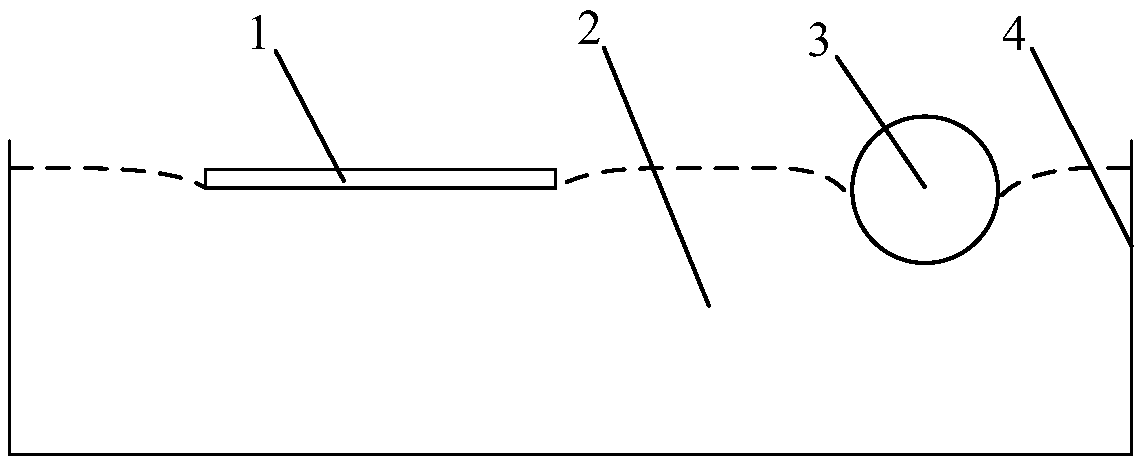
[0030] The operating environment of the present invention is as figure 1 As shown, it includes a micro robot 1, a liquid 2, a micro component 3, and a container 4. The micro-robot 1 is a pentagram-shaped magnetic sheet made of spring steel and obtained by laser cutting. The thickness of the robot is 0.04mm, the outer edge radius is 0.4mm, and it is magnetized along the radial direction. The micro-robot 1 and the micro-component 3 float on the surface of the liquid 2 under the action of surface tension, and the friction force is negligible.
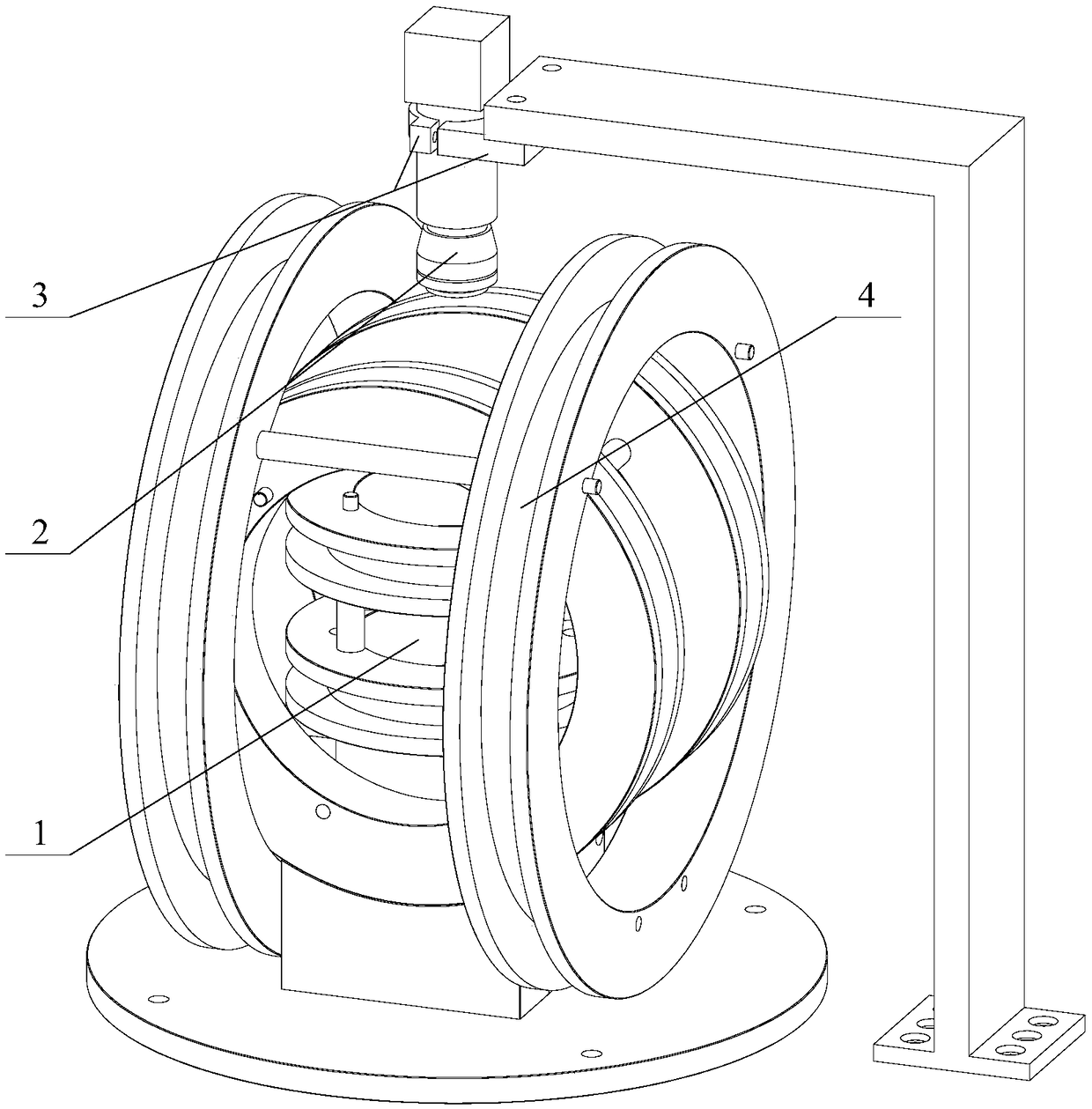
[0031] The implementing device of the present invention is as figure 2 As shown, it consists of a stage 1, a CCD microscope 2, a CCD fixture 3 and a magnetic field driving device 4. when working figure 1 The middle container is placed in the center of the stage 1, and the rotating magnetic field is generated by adjusting...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More