

Hydraulic-electric hybrid-driven walking robot
A walking robot and hybrid drive technology, applied in the field of robots, can solve the problems of large energy loss, low energy utilization rate, large kinetic energy loss, etc., and achieve the effects of simple working device, simple structure, and increased power-to-weight ratio.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
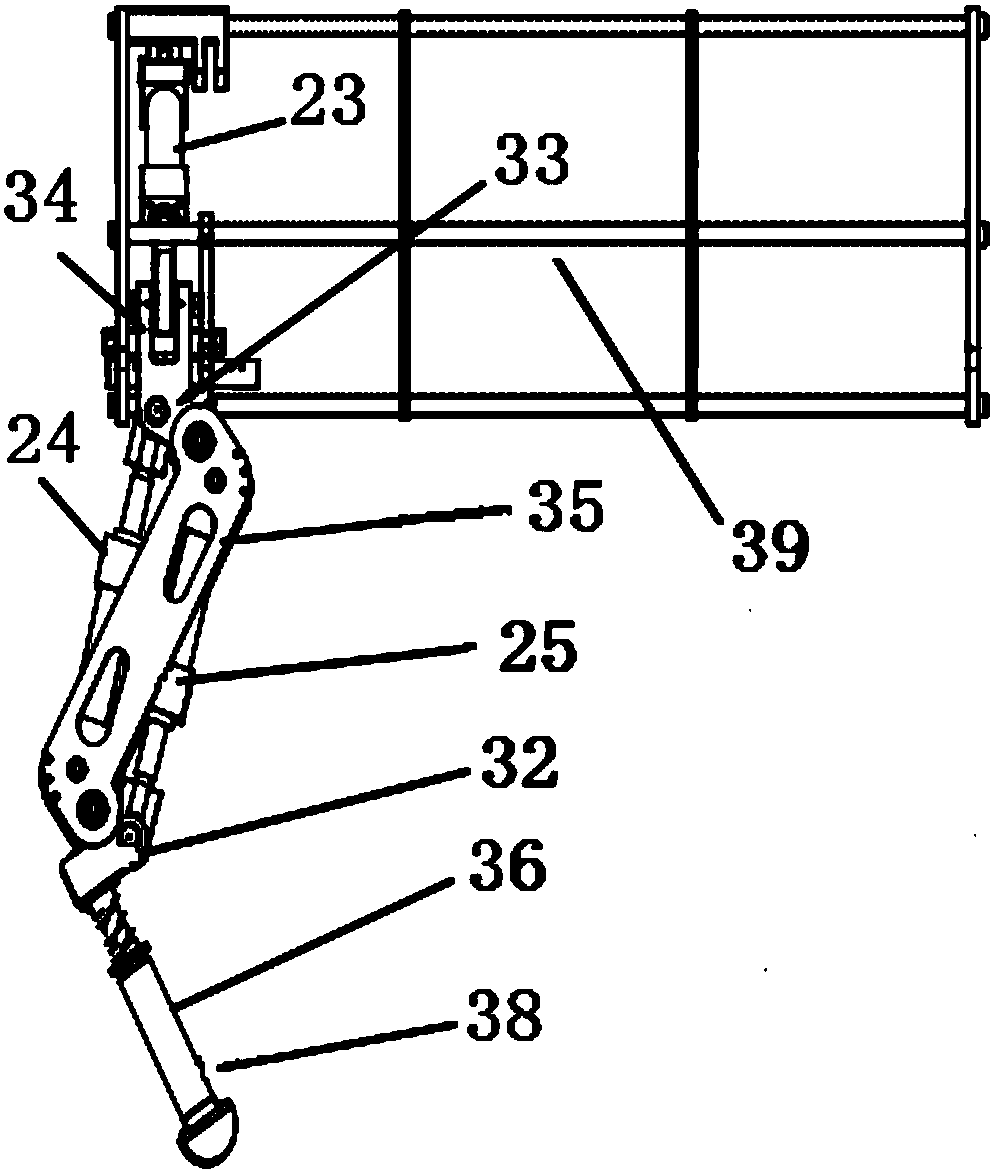
[0032] Such as figure 1 As shown, a walking robot driven by a hydraulic-electric hybrid comprises: a body 39 and a right front leg (not shown), a right rear leg (not shown), a left front leg (not shown) and Left hind leg 38, wherein each leg all comprises: thigh assembly 35, shank assembly 36, longitudinal hip joint 33, transverse hip joint 34 and knee joint 32, the body and thigh assembly are connected by longitudinal hip joint and transverse hip joint, The thigh assembly and the calf assembly are connected through the knee joint; it also includes a second hydraulic-electric hybrid drive circuit (41), wherein:
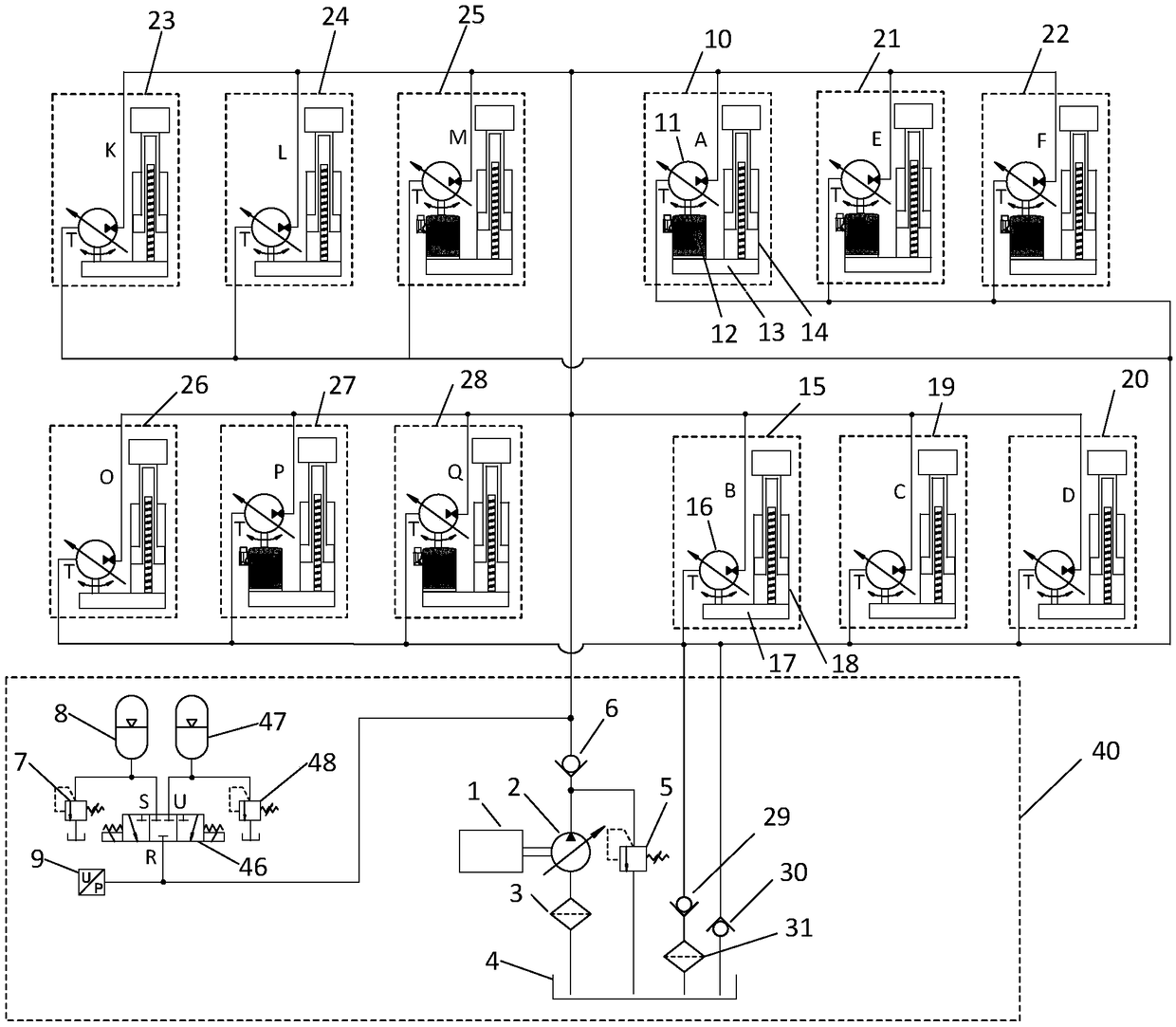
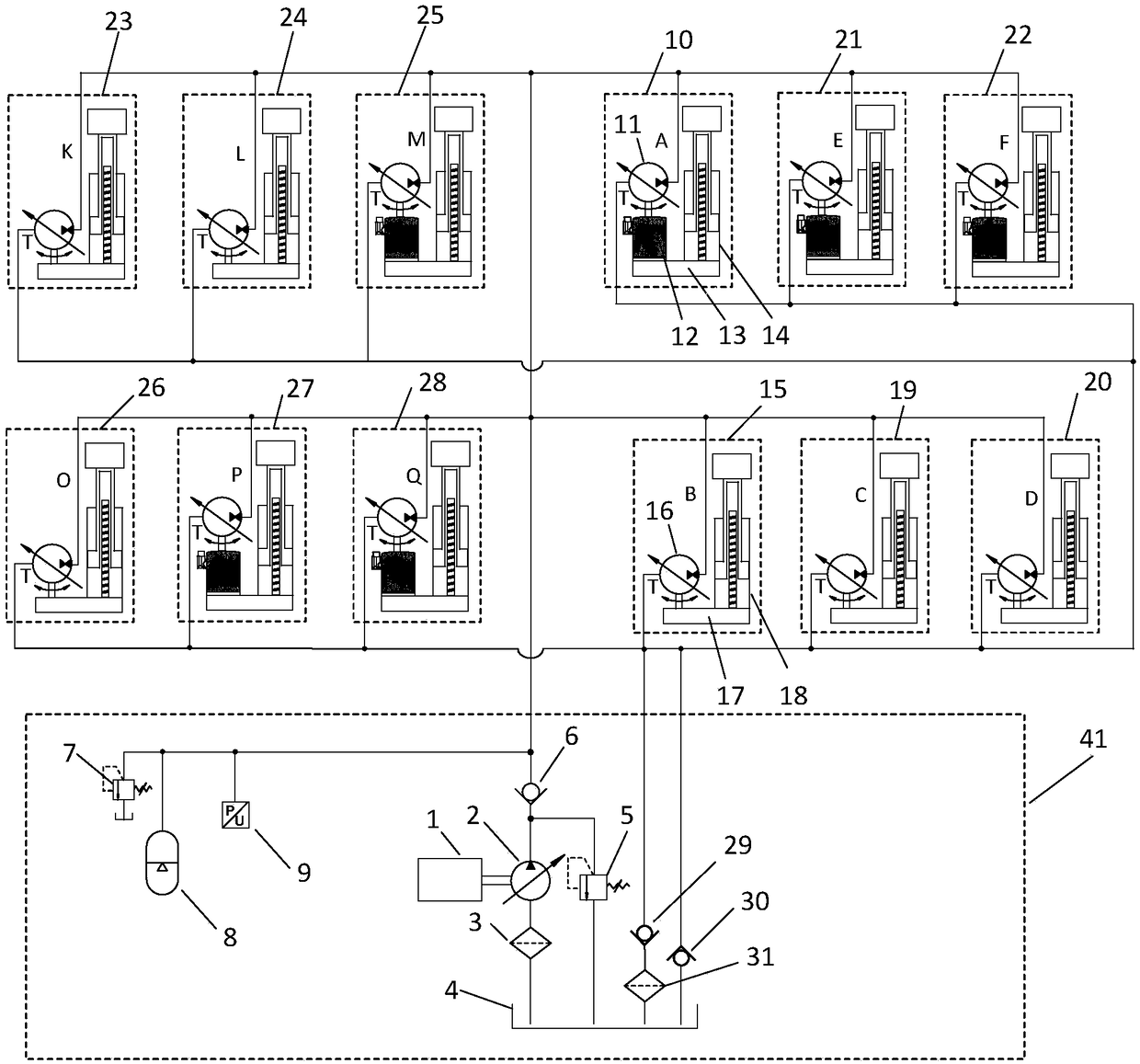
[0033] Such as image 3 As shown, the second hydraulic-electric hybrid drive circuit includes: power source 1, constant pressure variable pump 2, first filter 3, second filter 31, oil tank 4, first relief valve 5, second relief valve 7 , the first one-way valve 6, the second one-way valve 29, the third one-way valve 30, the first accumulator 8, the pressure sensor 9...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More