A har-surf-ran feature point matching method for stereo vision 3D reconstruction
A feature point matching and 3D reconstruction technology, applied in 3D modeling, image analysis, image enhancement, etc., can solve the problems of non-optimal parameters, large amount of calculation, slow algorithm speed, etc., to reduce the amount of calculation and redundant points. Less, the effect of increasing speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0059] Further describe the present invention below in conjunction with accompanying drawing:
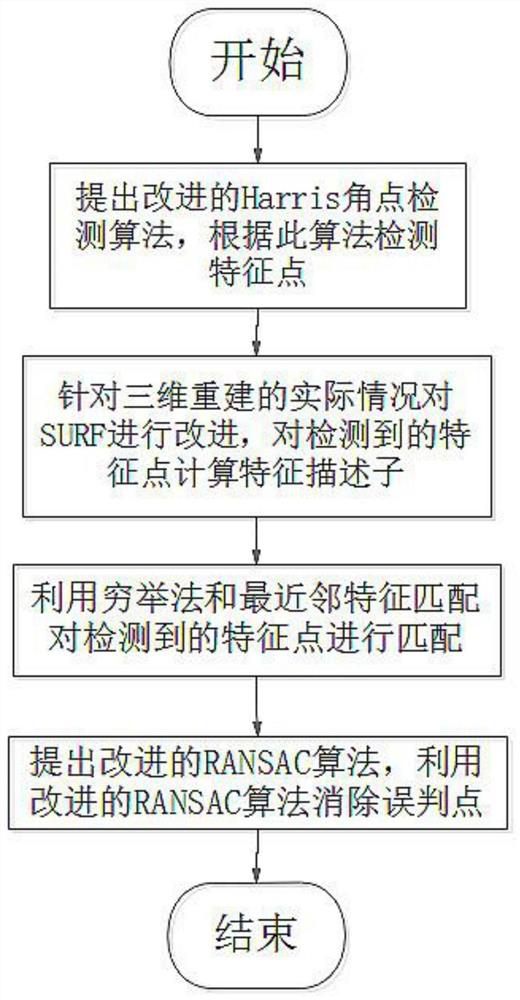
[0060] Such as figure 1 , a Har-SURF-RAN feature point matching method for stereoscopic three-dimensional reconstruction, comprising the following steps:
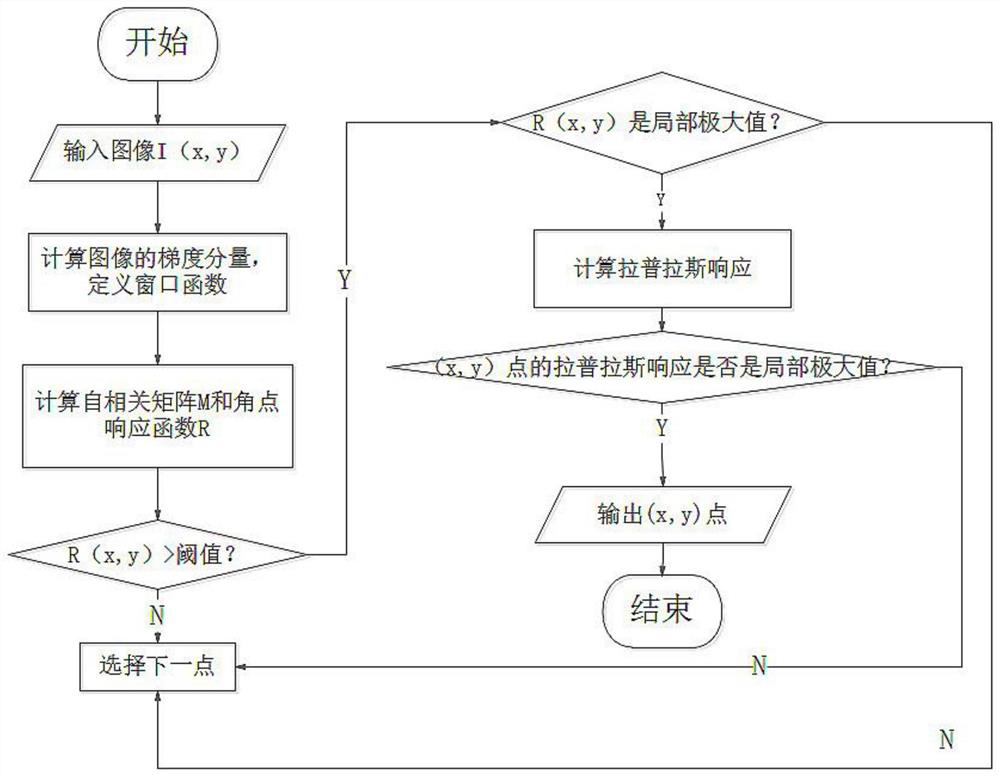
[0061] Step (1): If figure 2 , using the improved Harris feature point detection algorithm, first preprocess the pixels in the image with Gaussian difference, then use the Harris operator to filter out the candidate feature points, and then use the Laplace operator with added weight coefficients to re-screen them, To obtain the feature points:
[0062] Step (1.1): Define the window function. Define a window function using Gaussian filtering:
[0063] w(x,y)=exp[-(x 2 +y 2 ) / (2σ 2 )];
[0064] Step (1.2): input image data, and calculate gradient components Ix, Iy for each pixel in the image;
[0065] Step (1.3): For each pixel in the image, calculate the autocorrelation matrix M and M', and calculate the pixel corner res...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - R&D
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com