

Accelerometer signal denoising method based on particle filtering and wavelet transform
A particle filter and accelerometer technology, which is used in navigation, mapping and navigation, and navigation calculation tools through velocity/acceleration measurement. The effect of increasing the number of particles
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
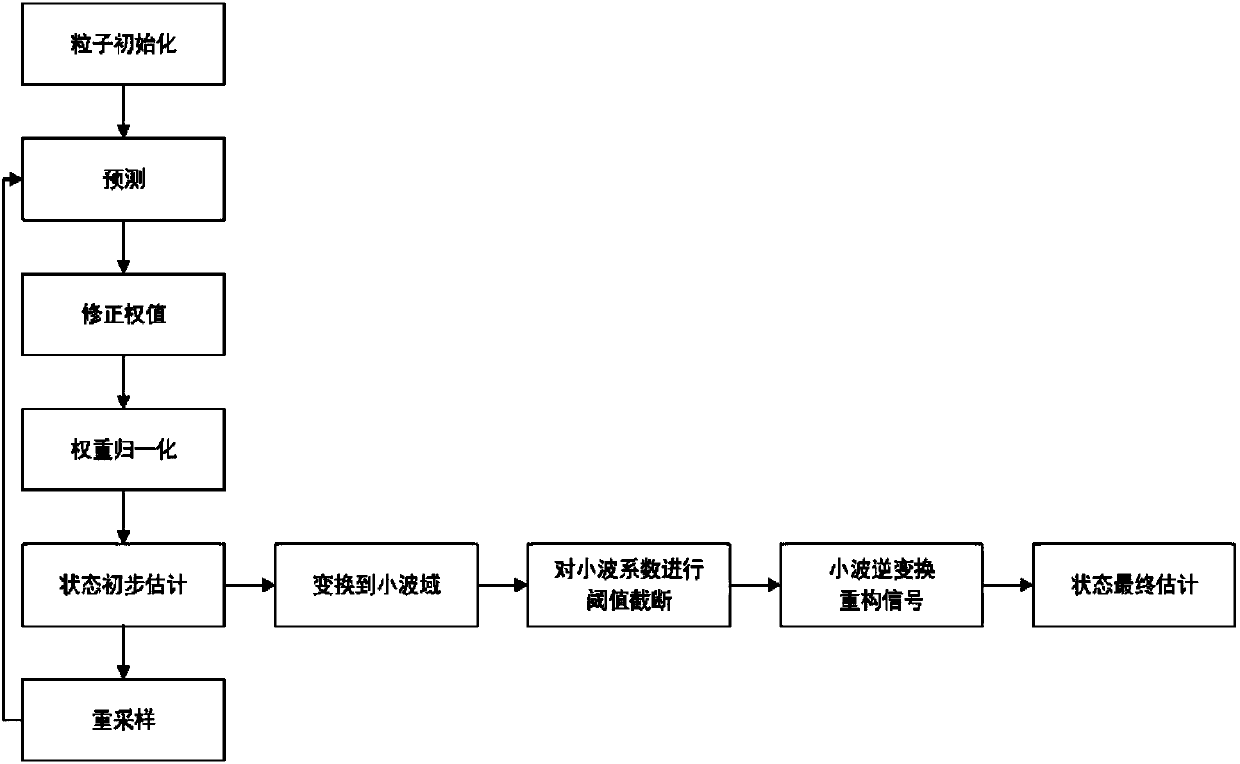
[0047] Based on particle filter and wavelet transform, an embodiment of the present invention proposes a method for denoising an accelerometer signal based on particle filter and wavelet transform. Because high-precision accelerometers are expensive and not suitable for popular applications, it is a feasible solution to optimize the noise reduction of low-cost accelerometer signals with poor precision. The embodiment of the present invention adopts the idea of combining particle filter and wavelet transform to achieve the purpose of optimizing and denoising the signal, see figure 1 , see the description below:
[0048] 101: Initialize the particles, apply the particle filter to the preprocessing part of acceleration signal denoising, retain the low entropy of wavelet denoising, describe the non-stationary characteristics of acceleration signals, and perform good denoising on nonlinear non-Gaussian systems ;
[0049] 102: According to the relationship between the observed v...
Embodiment 2
[0054] Combine below figure 1 , the specific calculation formula, the scheme in embodiment 1 is further introduced, see the following description for details:
[0055] 201: Based on the Bayesian criterion, the accelerometer can be described as a discrete dynamic system including state equations and observation equations as follows;
[0056] x k =f(x k-1 )+v k-1 (3)
[0057] z k = h k (x k )+w k (4)
[0058] Among them, formula (3) is the state equation, which is used to express the change of the state of the discrete dynamic system with time; formula (4) is the observation equation, which describes the relationship between the state and the observed quantity at a certain moment. k is the index, x k and z k are state variables and measured variables, respectively, v k and w k are process noise and measurement noise, respectively. f(·) state transition equation, h(·) is the observation equation.
[0059] 202: Initialize the particles;
[0060] sample particle ...
Embodiment 3
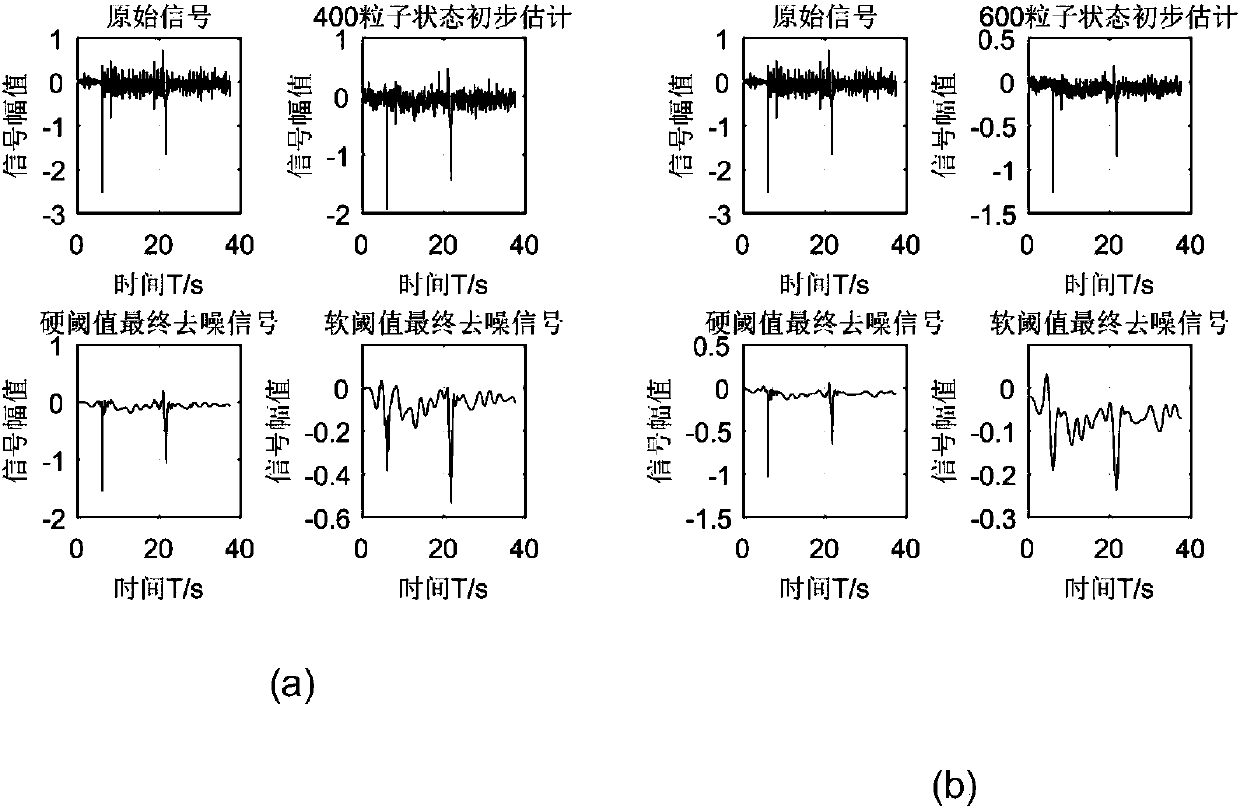
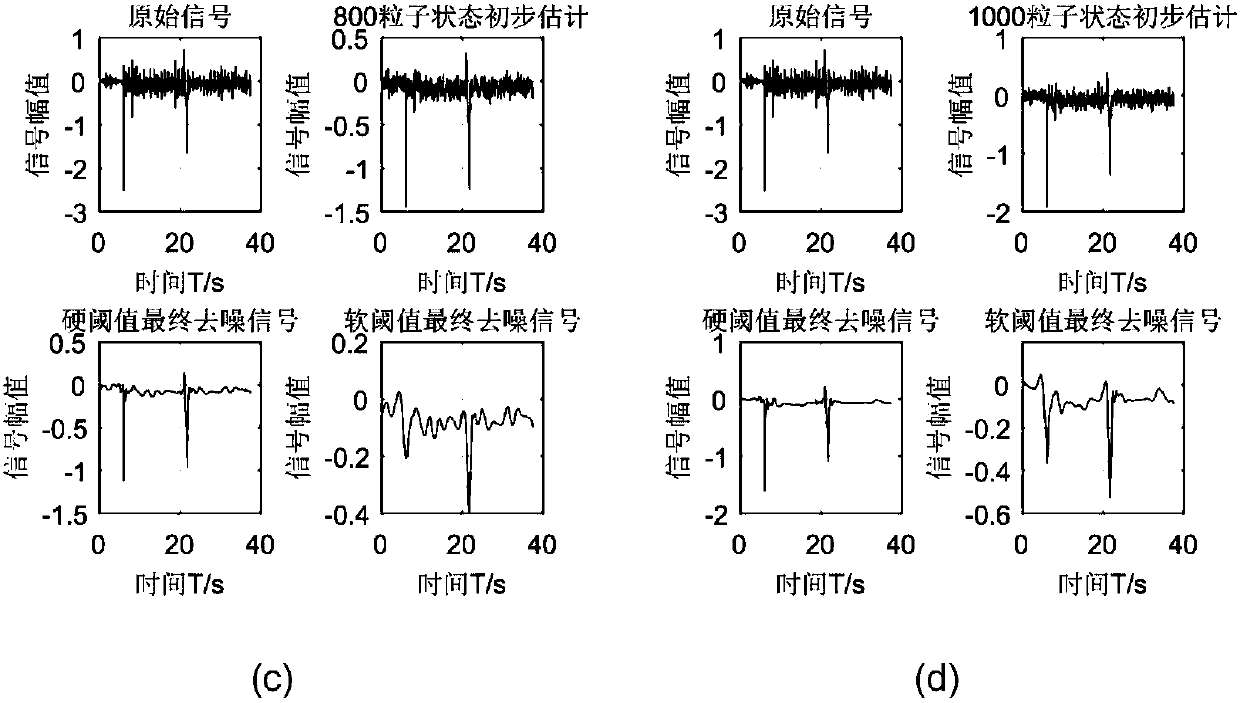
[0090] Combine below Figure 3-Figure 4 , and Table 1-Table 2 verifies the feasibility of the scheme in Examples 1 and 2, see the following description for details:
[0091] Quantitatively, Table 1 shows that as the number of particles increases, the root mean square error of denoising acceleration signals by this method gradually decreases. And the denoising effect of choosing the default threshold is better than that of soft threshold and hard threshold. Table 2 shows the error results of positioning the instance whose real trajectory length is 3.8m by double integrating the acceleration signal denoised by particle filter, wavelet transform and this method. The positioning error results show that the positioning accuracy of the denoising acceleration signal by this method is obviously better than other denoising methods.
[0092] When using particle filter to preprocess the acceleration signal, in order to obtain the best denoising effect, the number of particles is select...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More