

Active compliance control strategy for stewart platform
A technology of active compliance and control strategy, applied in the direction of adaptive control, general control system, control/regulation system, etc., can solve the problem of high fault tolerance rate and achieve the effect of improving fault tolerance rate
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
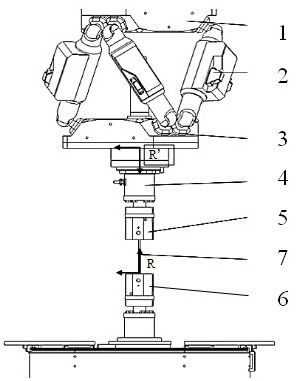
[0049] see Figure 1 to Figure 5 As shown, the specified load is applied to the specimen. Here we take pure bending loading as an example.
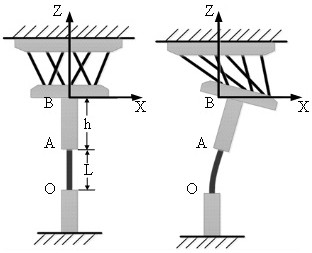
[0050] Step 1: Trajectory planning. Since the moving platform of the Stewart platform is used as the loading unit, the trajectory of the moving platform during the bending process of the specimen needs to be obtained. First, take the fixed end, that is, the lower fixture as the initial coordinate system R, and calculate the motion trajectory of the moving end, that is, the upper fixture during the pure bending process of the specimen. From the pure bending deflection equation The trajectory C of point A in the coordinate system R can be obtained 1 for
[0051]
[0052] Y=0 (2)
[0053]
[0054] U=0 (4)
[0055] V=α (5)
[0056] Z = 0 (6)
[0057] where f B is the bending deflection, α is the bending angle, M e is the bending moment; E and I are the elastic modulus and section moment of inertia of the specimen respectivel...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More