

Variable-rigidity flexible grabbing device
A grasping device and variable stiffness technology, applied in the directions of manipulators, program-controlled manipulators, chucks, etc., can solve the problems of high manufacturing cost of rigid grippers, reduced success rate, unstable lateral buckling, etc., and achieve continuous and rapid stiffness. , Continuously and rapidly changing, the effect of large variable stiffness range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The following is attached figure 1In 5, the preferred embodiments of the present invention will be further described in detail, so as to understand the purpose, features and advantages of the present invention more clearly. It should be understood that the embodiments shown in the drawings are not intended to limit the scope of the present invention, but only to illustrate the essence of the technical solutions of the present invention.
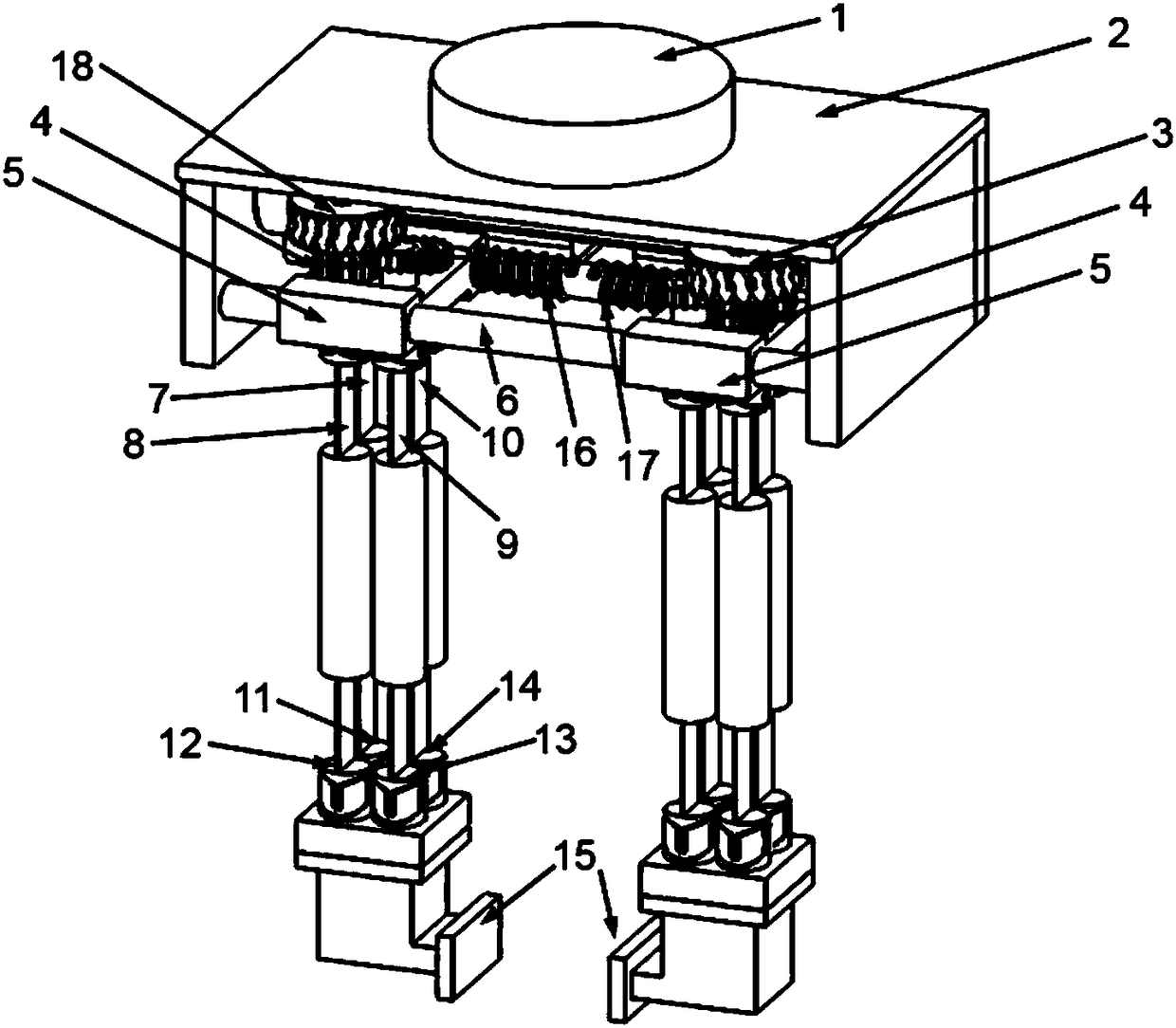
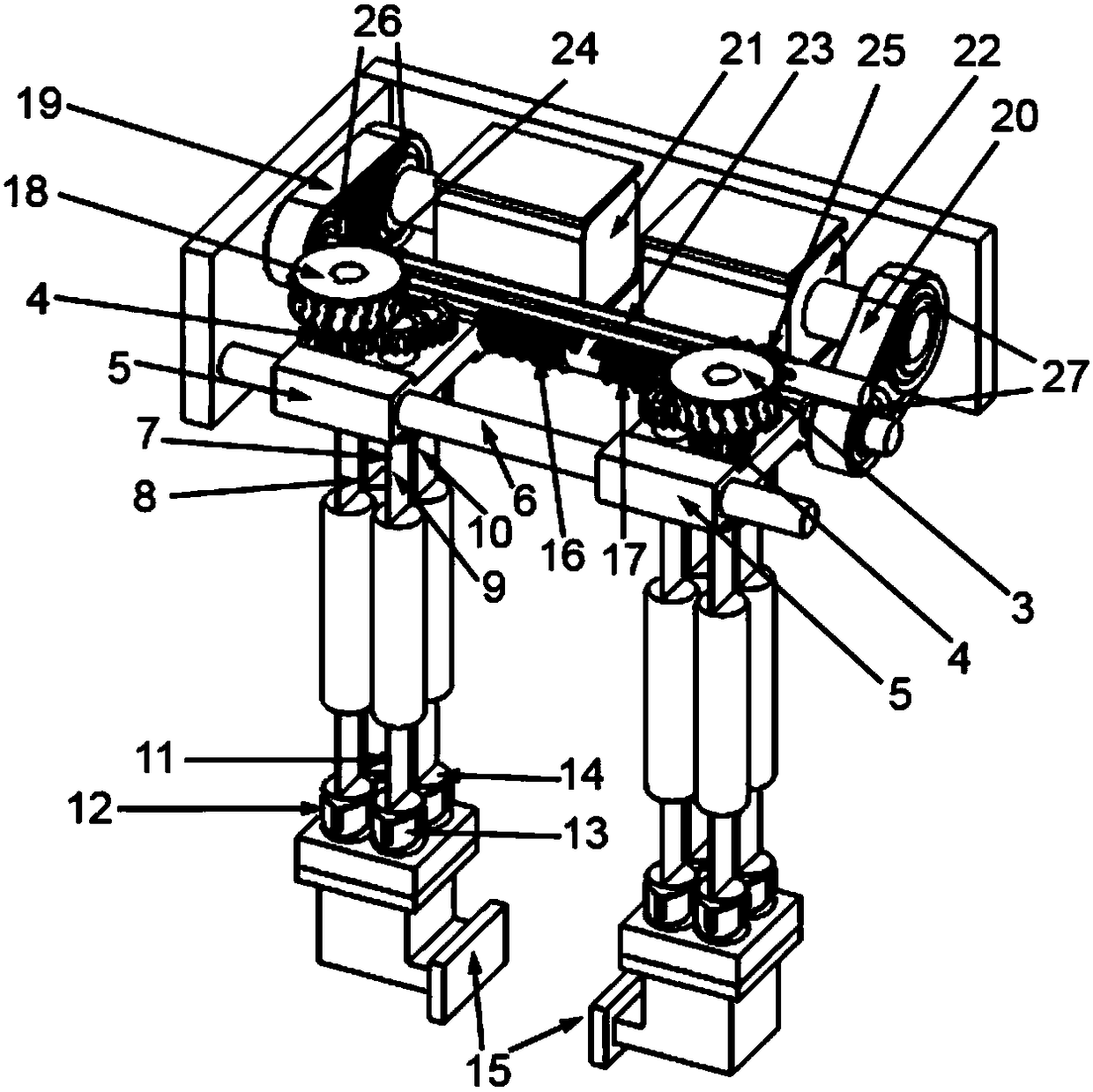
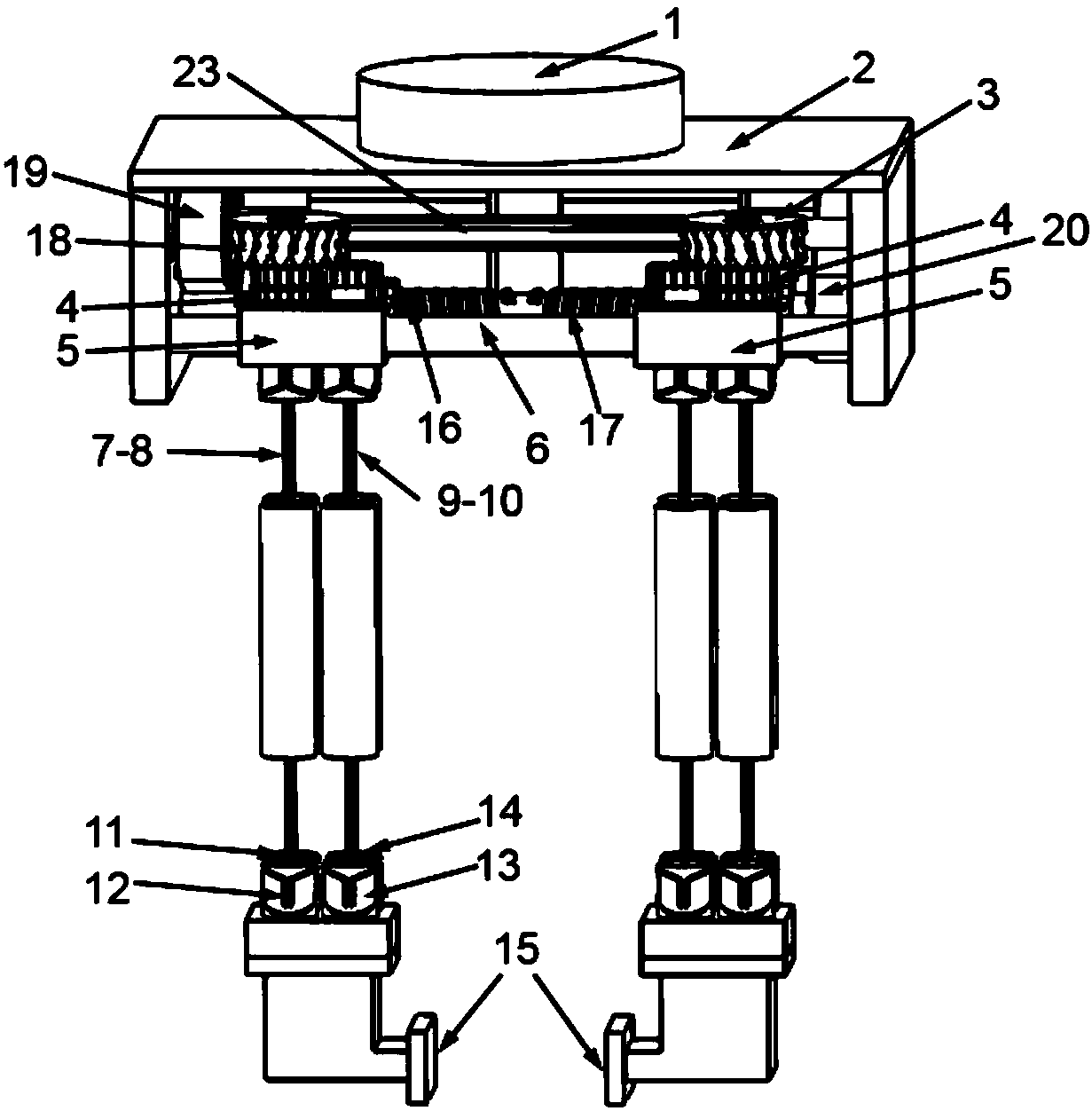
[0029] Figure 1 to Figure 5 It is a three-dimensional structural schematic diagram of the variable stiffness and compliant grabbing device in this embodiment, and the reference signs therein are: flange connection plate 1, casing 2, right-handed worm wheel 3, pinion 4, slider 5, linear guide rail 6, sheet Spring flexible joints 7, 8, 9, 10, flexible universal joints 11, 12, 13, 14, jaws 15, right-handed screw 16, left-handed screw 17, left-handed worm wheel 18, stiffness adjustment drive timing belt 19, opening Closing motion transm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More