

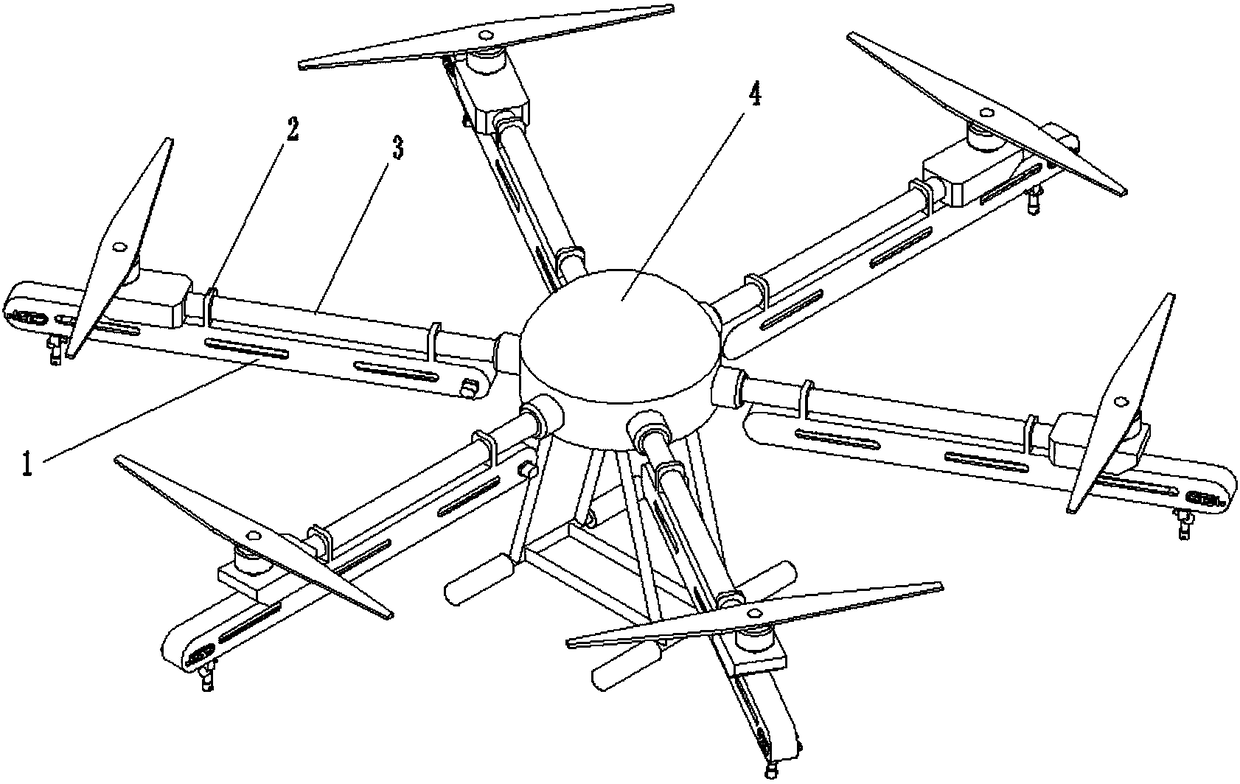
Self-adaptive sprinkling width regulating device and method for multi-rotor plant protection unmanned aerial vehicle
A technology for planting and protecting drones and control devices, which can be applied to launch devices, devices for capturing or killing insects, and applications, and can solve problems such as adaptive control and inability to adaptive control.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
no. 1 example
[0181] like Figure 9 As shown, the adaptive spray width control method of the six-rotor plant protection UAV includes the following steps:
[0182] Step 1: read data, hover over;
[0183] The six-rotor plant protection UAV reads the data of the base station information database of the modern standardized orchard center at a fixed height H 0 Autonomous flight, according to the fruit tree planting coordinate points (X i , Y i ) to realize fixed-point hovering at the top of the fruit tree (i=1, 2, 3...i max , representing the i-th fruit tree);
[0184] where the fixed height H 0 It is the flying height of the six-rotor plant protection drone, that is, the vertical distance from the six-rotor plant protection drone to the ground during normal operation.
[0185] Step 2: One scan calculation, centering adjustment;
[0186] The six-rotor plant protection UAV first adjusts the Y-axis direction, and then adjusts the X-axis direction.
[0187] like Figure 5 , Image 6 As sh...
no. 2 example
[0209] For quad-rotor or octa-rotor plant protection drones, there is no restriction on the order of adjustment. like Figure 8 As shown in the figure, only the axis M of the adaptive spray device in the direction of the X-axis and Y-axis is shown 1 m 2 , N 1 N 2 , at this time ∠M 1 ON 1 =θ=π / 2. The steps are the same as in the first embodiment, and the distances ΔX and ΔY that need to be adjusted by the UAV in the X-axis and Y-axis directions are also obtained:
[0210] ΔX=πnd(t N1 -t N2 ) / 2
[0211] ΔY=πnd(t M1 -t M2 ) / 2
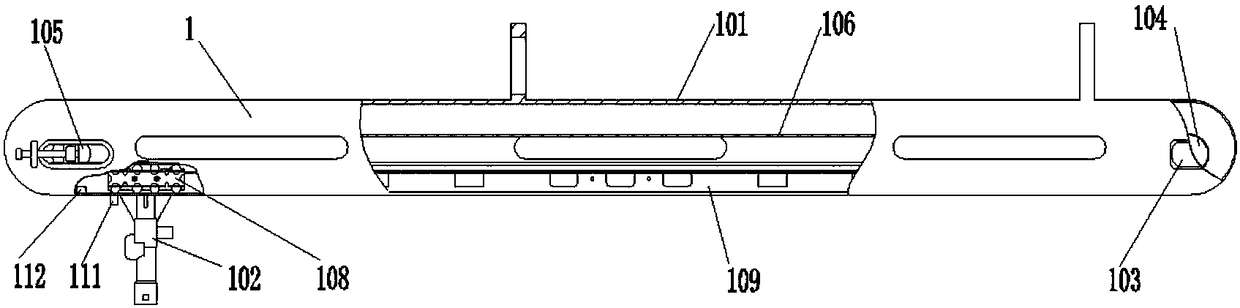
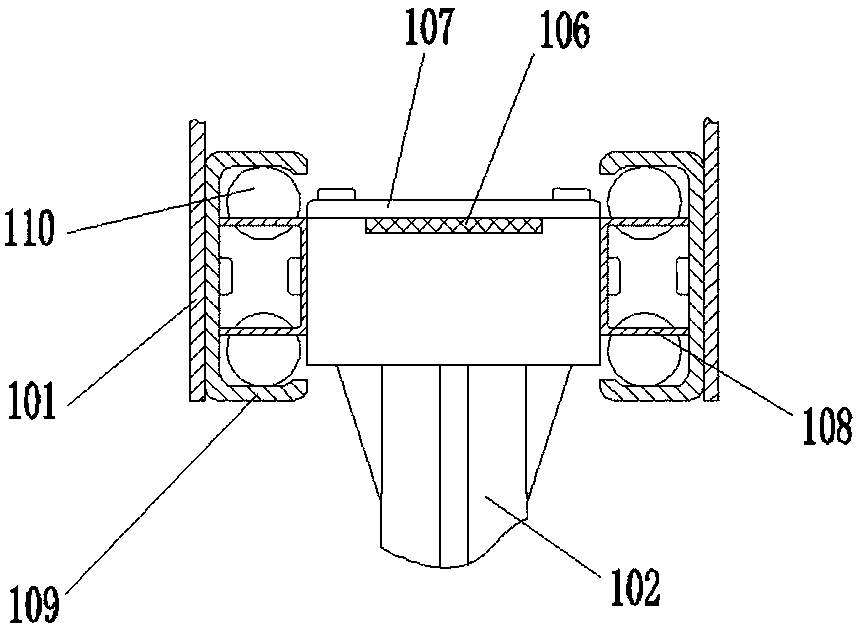
[0212] n is the rotating speed of stepper motor 103;
[0213] D is the diameter of active synchronous toothed belt pulley 104 and driven synchronous toothed belt pulley 105;
[0214] t M1 , t M2 are two laser sensors M on the axis parallel to the Y axis 1 and M 2 The collection time corresponding to the height value that meets the conditions is collected;
[0215] t N1 , t N2 Respectively two laser sensors N on the axis parallel to the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More