

Soft touching hand for grabbing object through stretching and contracting of telescopic ring
A technology of telescopic rings and tentacles, applied in the field of robotic hands, can solve the problem that pneumatic flexible fingers are not suitable for grasping small spherical objects, and achieve the effect of increasing the diameter range
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] The present invention will be further described in detail below in conjunction with the accompanying drawings. The implementation examples described here are only used to illustrate and explain the present invention, and should not limit the present invention accordingly.
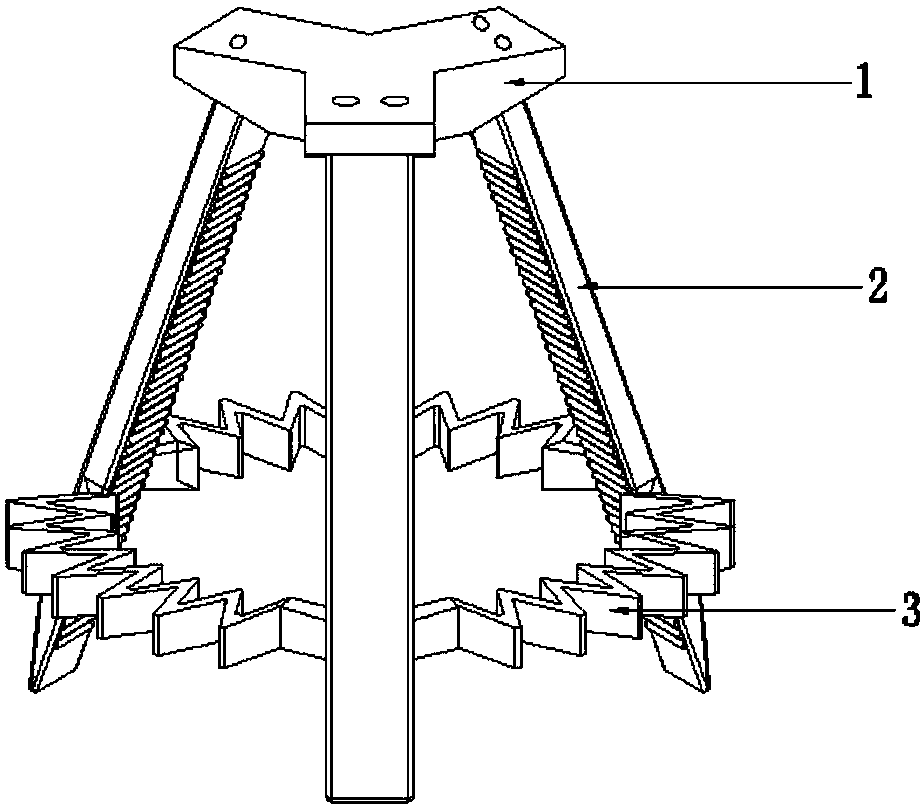
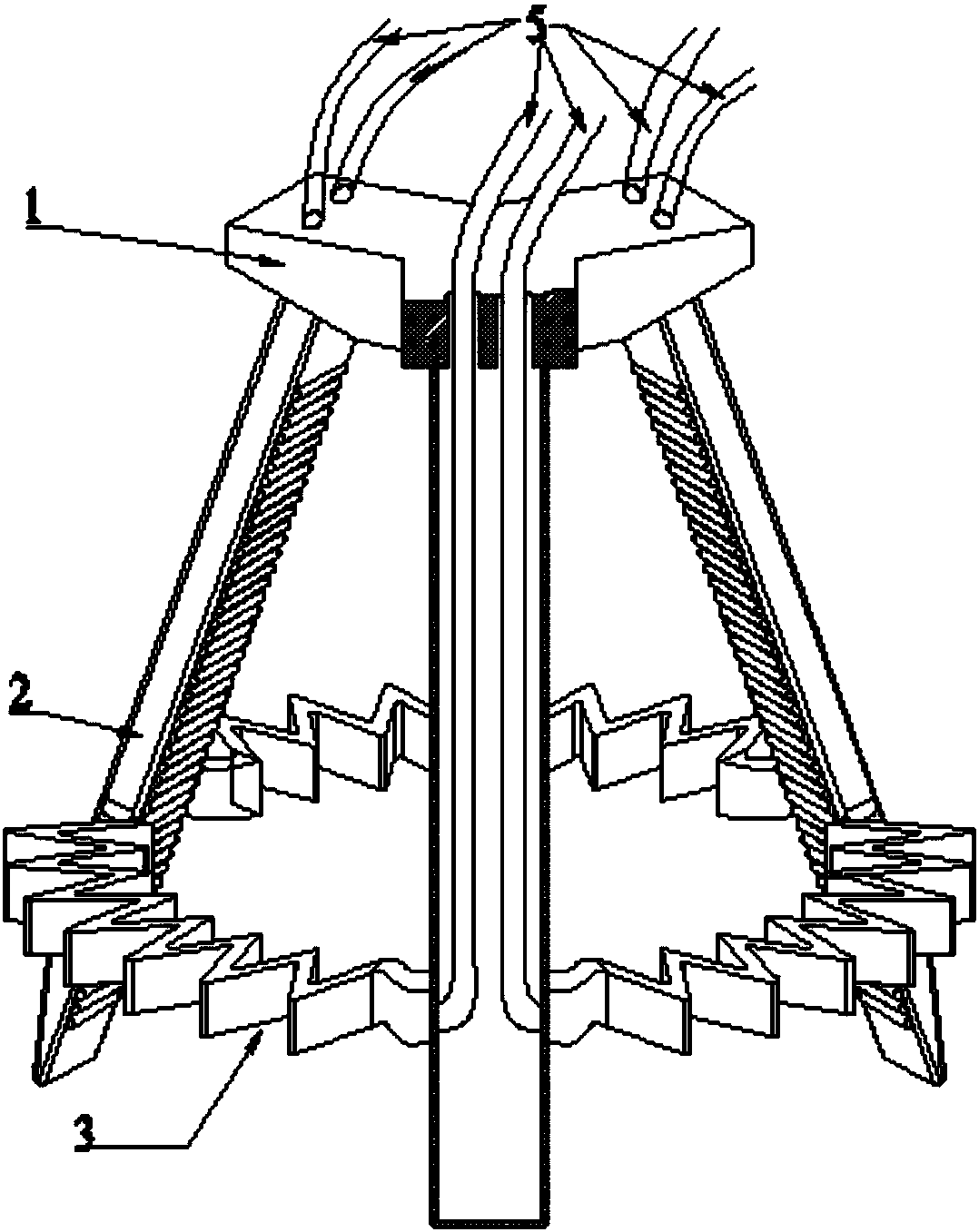
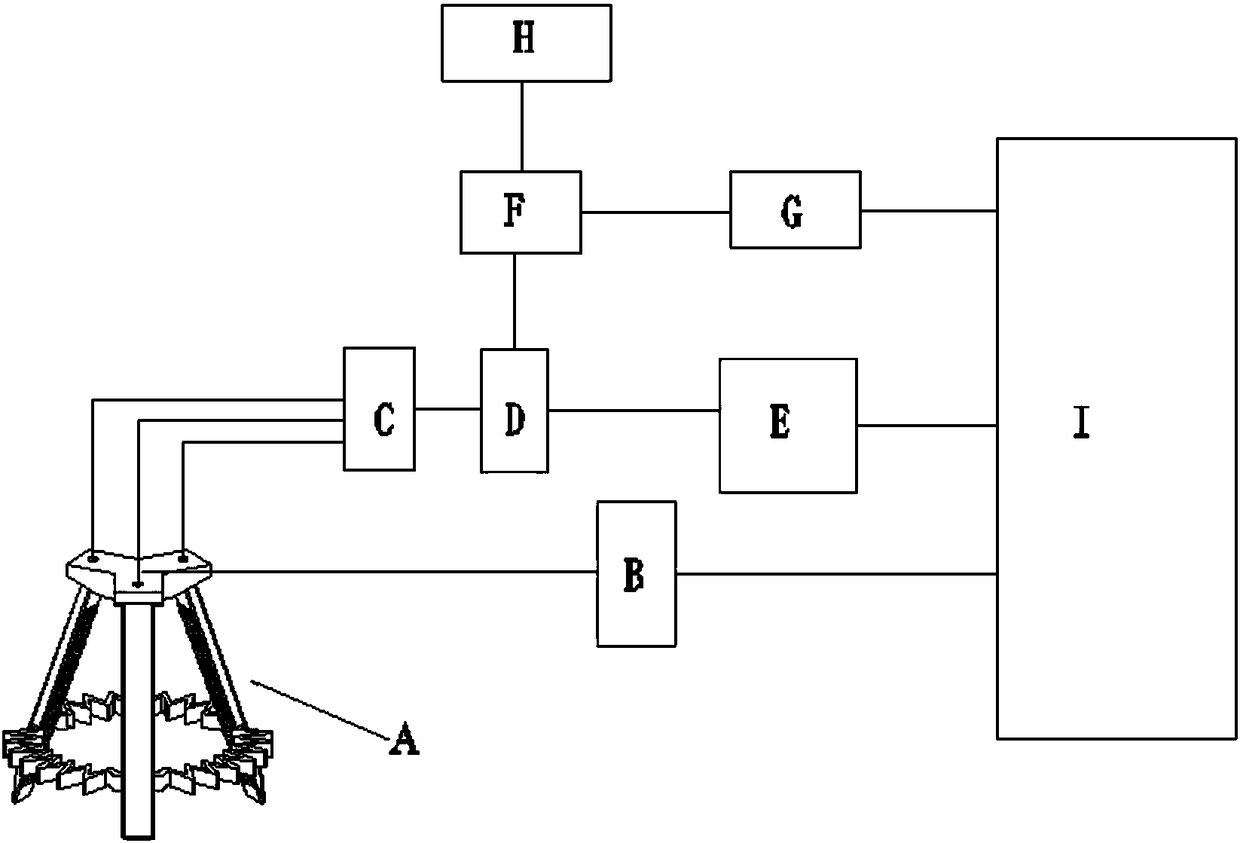
[0019] A kind of soft tentacles that rely on the expansion and contraction of the telescopic ring to grab objects is characterized in that: the main part includes a tentacle bracket 1, tentacle fingers 2, a telescopic ring 3, and an air duct 5; the control part includes a distance sensor 4 and an A / D converter B , Air source distributor C, solenoid valve D, driver E, electric proportional regulating valve F, D / A converter G, air pump H, PLC control system I. see Figure 5 , the tentacle bracket 1 includes six ventilation holes, one mounting hole and 12 screw holes. see Figure 4 , the inside of the tentacle finger 2 has a cavity, and the two smaller sides each have a round hole, the round hole comm...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More