

Method for conducting virtual simulation on breaker assembly robot
A technology of circuit breaker assembly and virtual simulation, applied in the directions of instruments, manipulators, program-controlled manipulators, etc., can solve problems such as comparison and display of calculation results without models, restricting product performance and efficiency, and numerous logical relationships, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0049] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
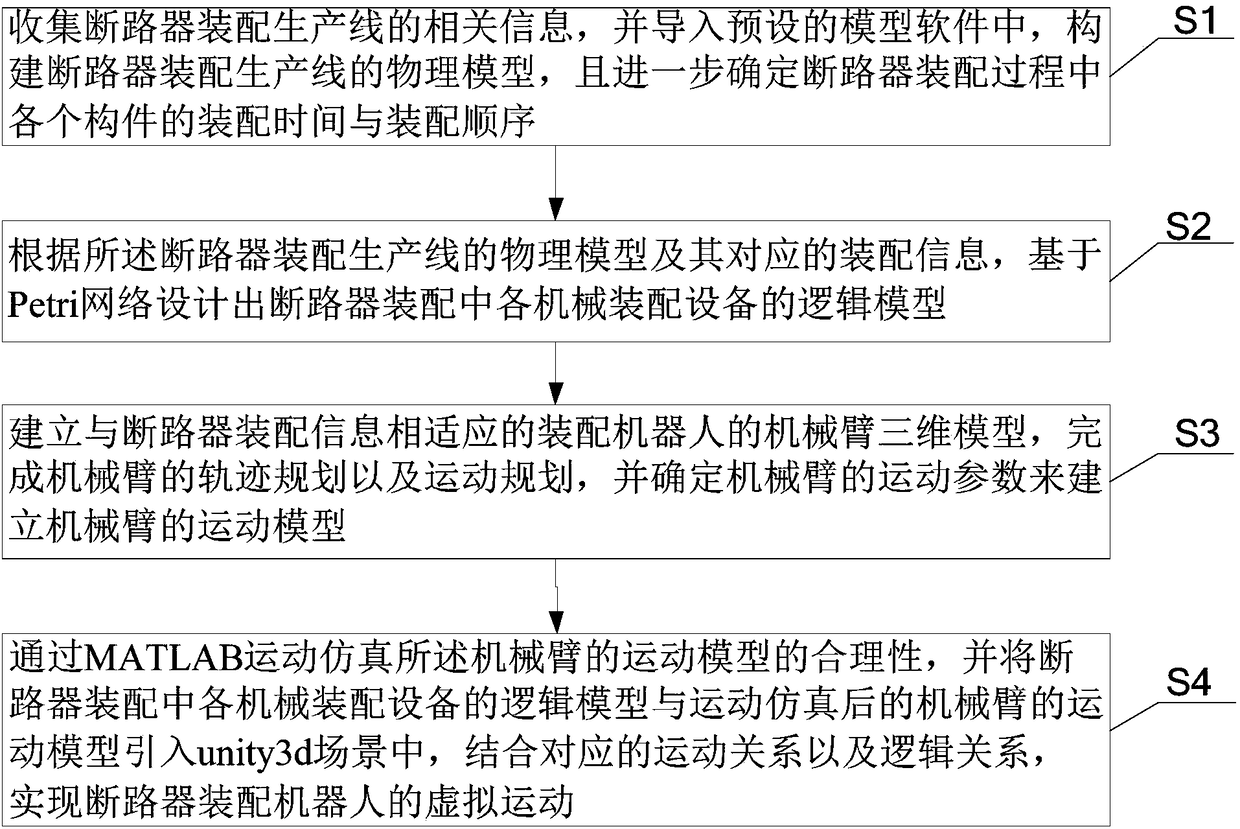
[0050] Such as figure 1 As shown, in the embodiment of the present invention, a method for virtual simulation of a circuit breaker assembly robot is provided, and the method includes:
[0051] Step S1, collect the relevant information of the circuit breaker assembly line, and import it into the preset model software to construct the physical model of the circuit breaker assembly line, and further determine the assembly time and assembly sequence of each component in the circuit breaker assembly process;
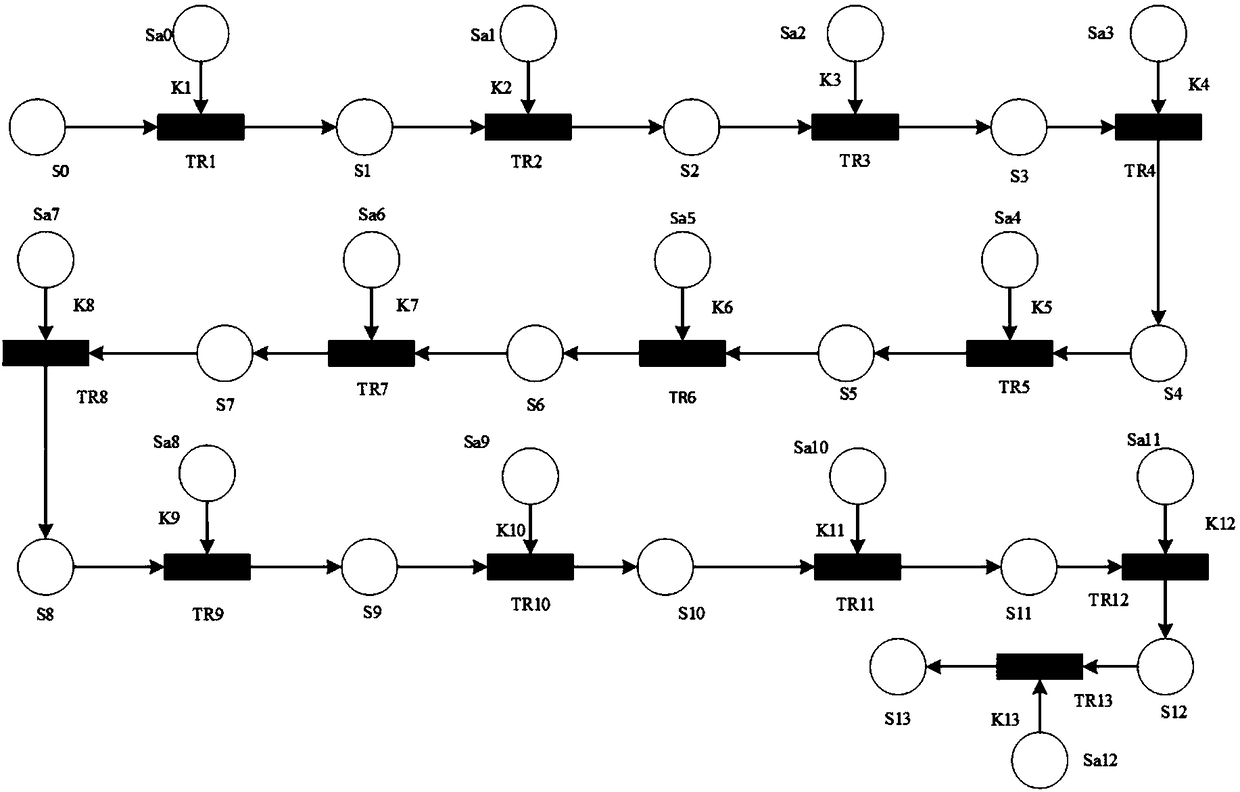
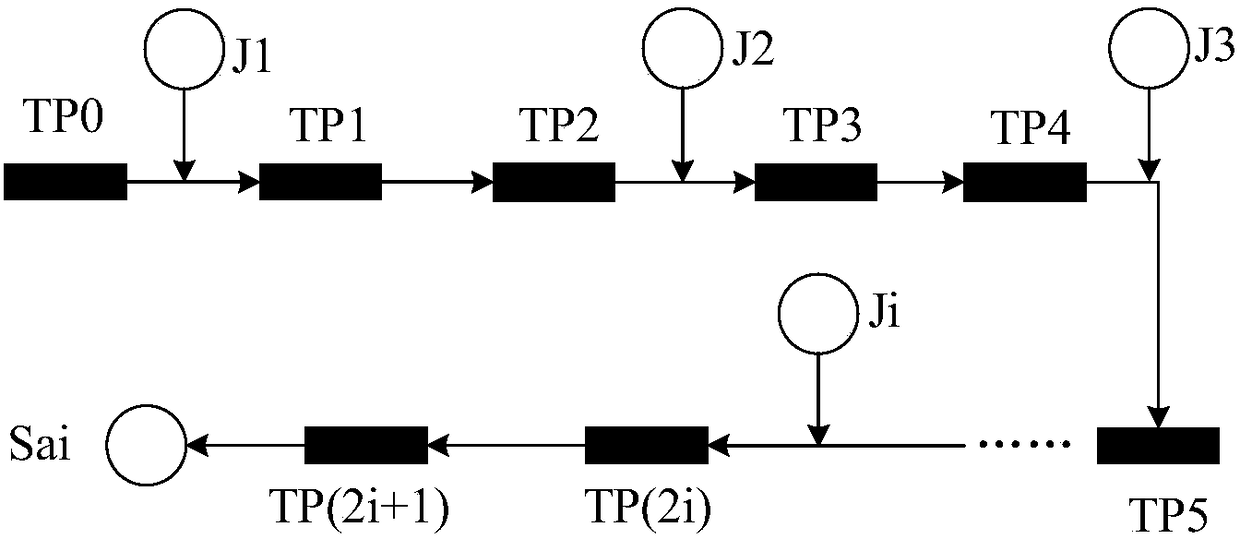
[0052] Step S2, according to the physical model of the circuit breaker assembly line and its corresponding assembly information, based on the Petri network design the logic model of each mechanical assembly equipment in the circuit breaker assembly;
[0053] Ste...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More