

Model-constraint-based mechanical arm energy optimal trajectory planning control method and device
A trajectory planning, energy-optimized technology, applied in manipulators, program control, general control systems, etc., can solve problems such as limited motor rated torque, motor loss, and inability to give full play to motor performance, achieving low energy consumption, simple algorithm, The effect of improving work efficiency and service life
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0065] This embodiment takes the horizontal multi-joint SCARA industrial robot as an example to introduce the energy-optimized trajectory planning solution under the condition of no friction. The specific steps are as follows:
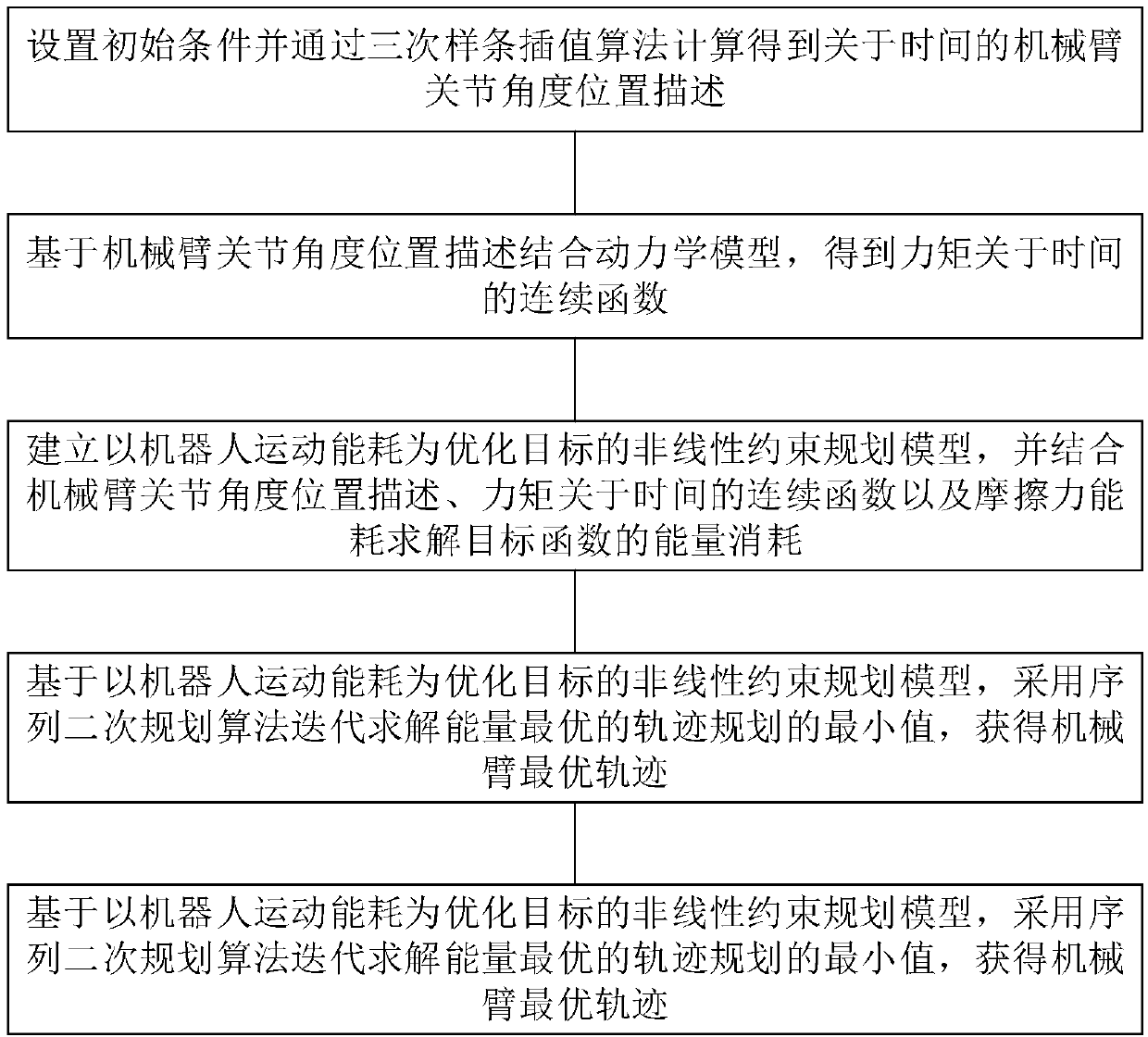
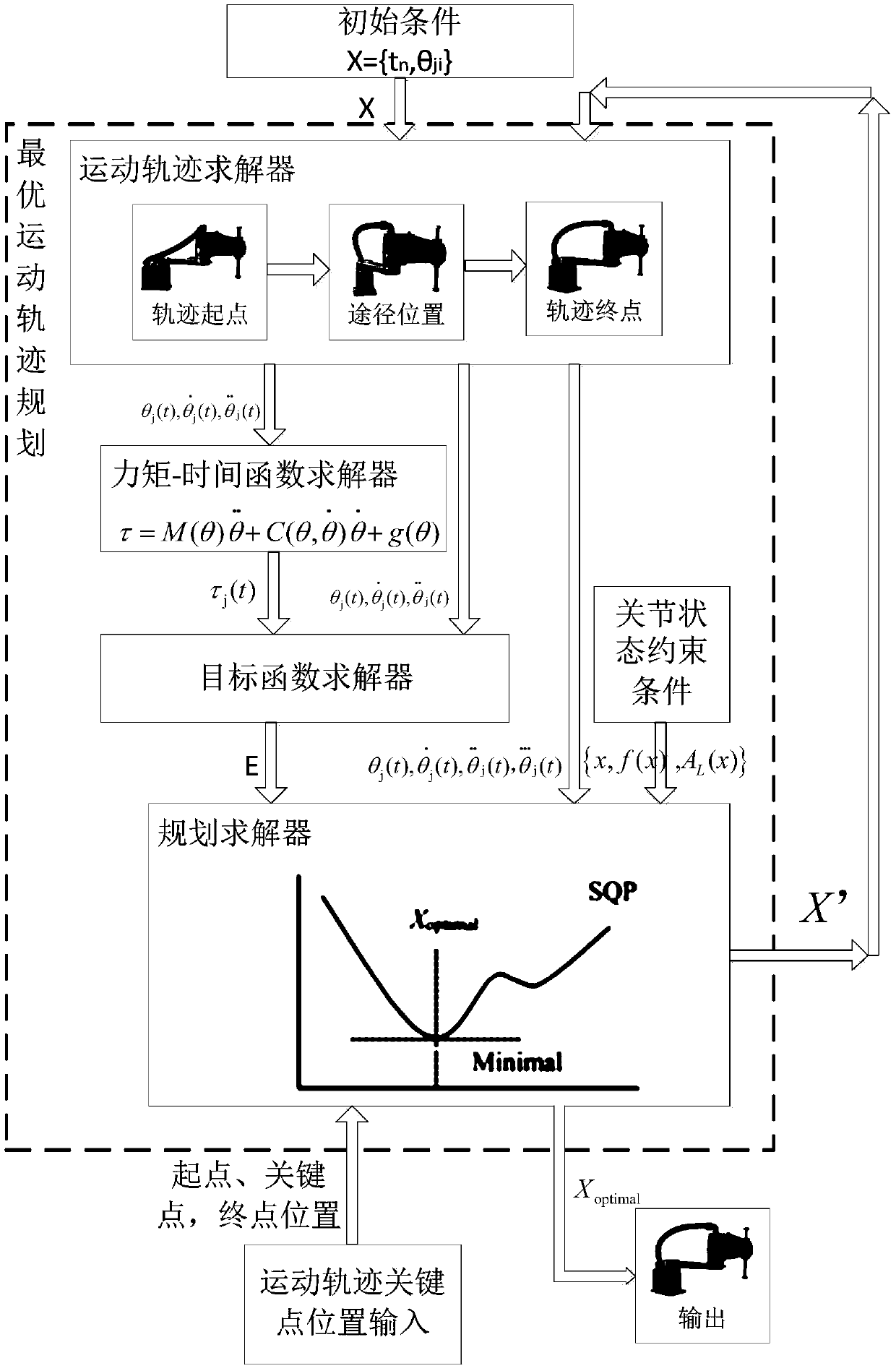
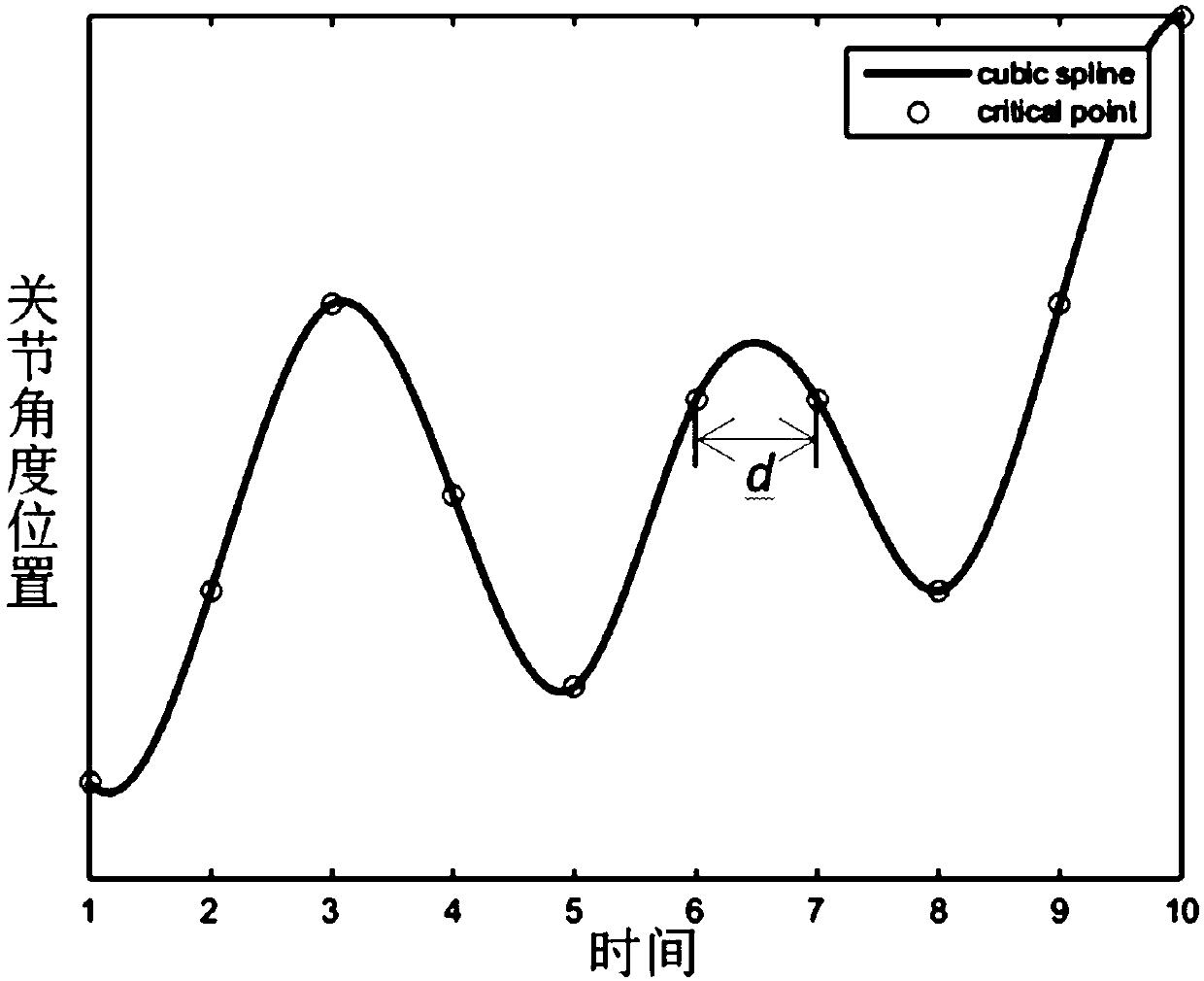
[0066] The first step is to set the initial condition time beat t = 1s, the swing angle of the big arm is 45 degrees, and the swing angle of the forearm is 40 degrees and brought into the motion trajectory solver to solve the continuous motion trajectory of the horizontal multi-joint robot;
[0067] In the second step, according to the continuous motion trajectory of the joint in the first step, it is brought into the torque-time function solver to calculate the function of the torque with respect to time;
[0068] In the third step, the trajectory and the moment-time function calculated in the first and second steps are brought into the objective function solver for frictionless energy consumption to solve the objective function;
[0069] The fourth s...
Embodiment 2
[0071] This embodiment takes the horizontal multi-joint SCARA industrial robot as an example to introduce the energy-optimized trajectory planning solution under the condition of increasing friction. The specific steps are as follows:
[0072] The first step is to set the initial condition time beat t = 1s, the swing angle of the big arm is 45 degrees, and the swing angle of the forearm is 40 degrees and brought into the motion trajectory solver to solve the continuous motion trajectory of the horizontal multi-joint robot;
[0073] In the second step, according to the continuous motion trajectory of the joint in the first step, it is brought into the torque-time function solver to calculate the function of the torque with respect to time;
[0074] In the third step, the trajectory and the moment-time function calculated in the first and second steps are brought into the objective function solver with friction energy consumption to solve the objective function;
[0075] The fou...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More