

Body state estimation method of legged robot based on multi-sensor information fusion
A robot body and state estimation technology, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., can solve problems that cannot be eliminated by filtering algorithms, do not consider position estimation, large noise, etc., to improve estimation efficiency and accuracy, and improve intelligence level, the effect of improving the estimation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0046] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
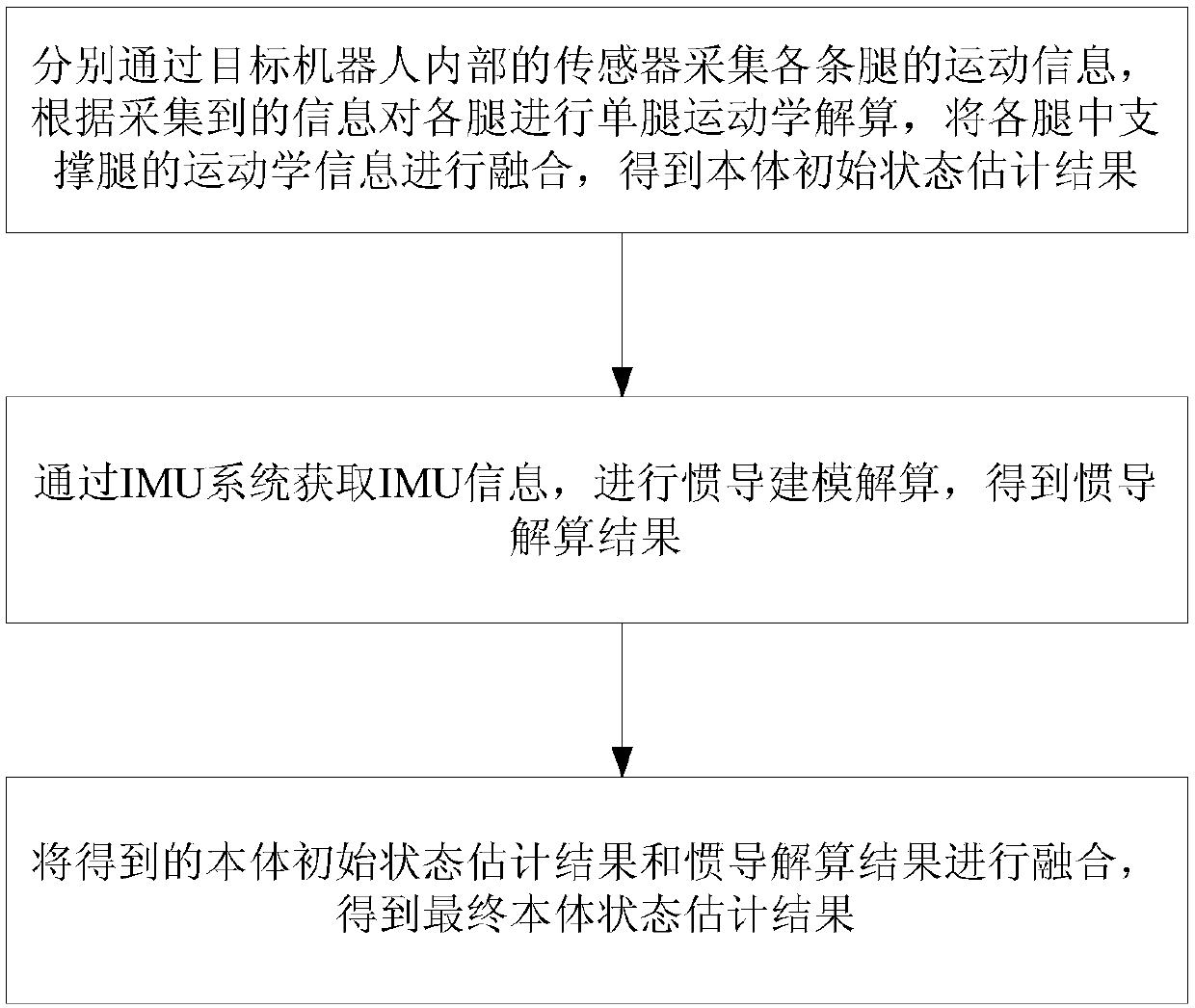
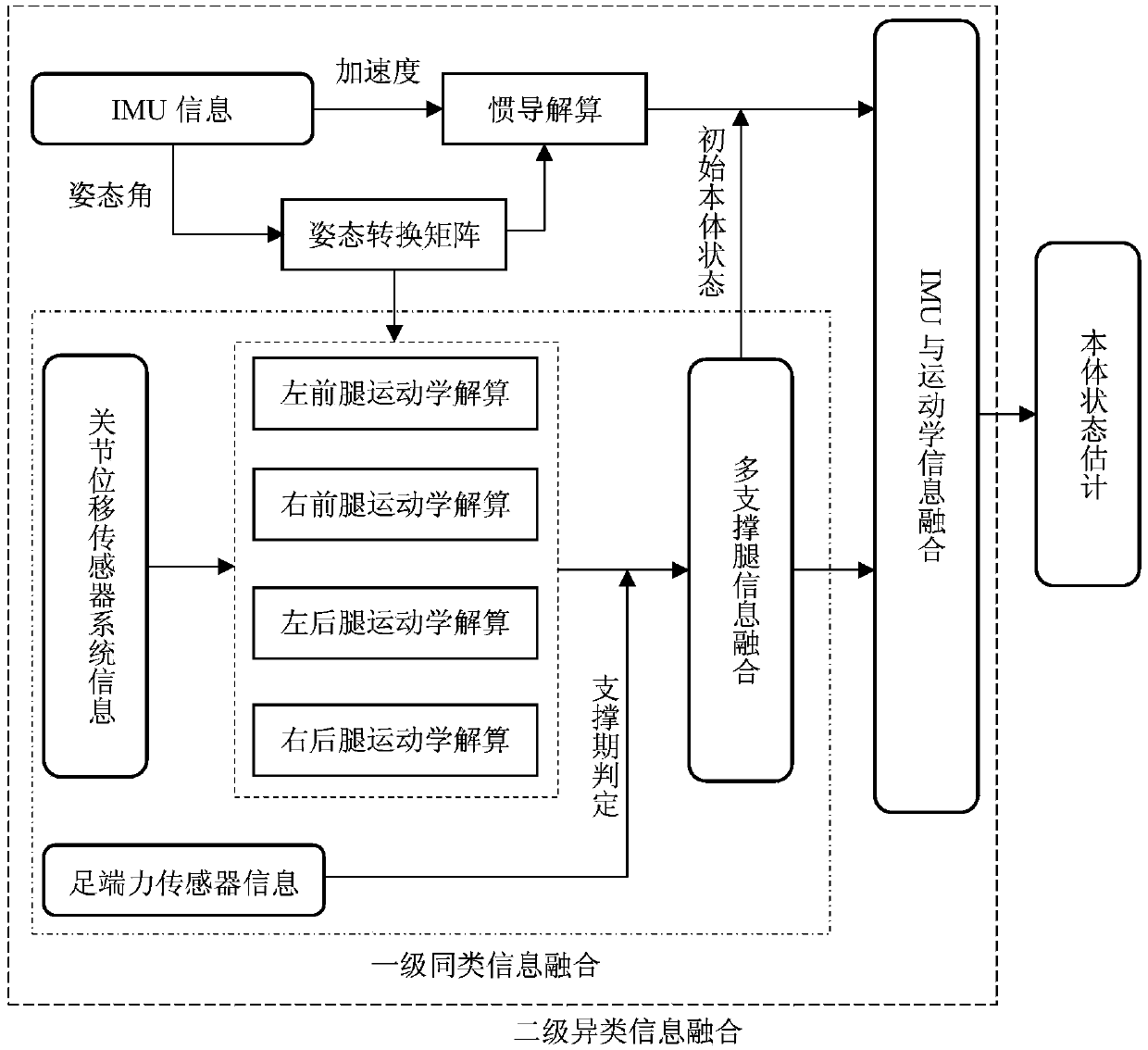
[0047] Such as figure 1 , 2 As shown, the present embodiment is based on the method for estimating the body state of a legged robot based on multi-sensor information fusion, and the steps include:
[0048] S1. First-level information fusion: Collect the motion information of each leg through the sensors inside the target robot, and perform single-leg kinematics calculations for each leg according to the collected information to obtain the kinematics information of each leg; The kinematic information of the supporting legs is fused to obtain the initial state estimation result of the body, where the state of the body includes the speed and position of the body;
[0049] S2. Inertial navigation modeling and calculation: Obtain the IMU information of the target r...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More