

A three-rotor wheeled amphibious robot
An amphibious three-robot technology, applied in motor vehicles, convertible vehicles, transportation and packaging, etc., can solve the problems of short battery life, small range of motion, poor maneuverability and operating ability, etc. limited effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
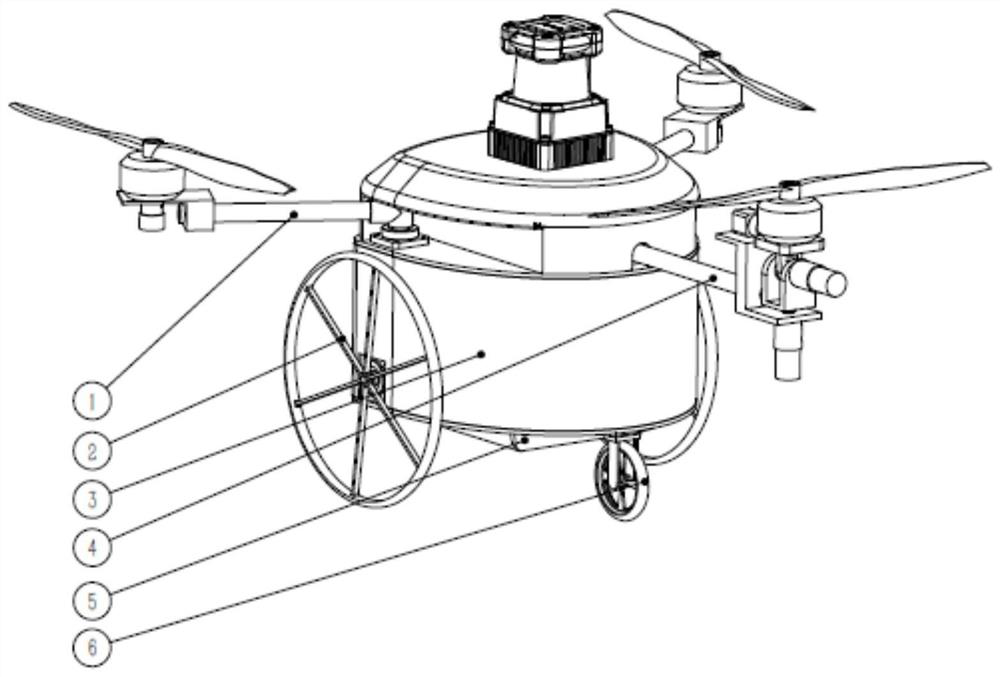
[0041] to combine figure 1 , the three-rotor wheeled amphibious robot of the present invention includes a rotary wing assembly 1, a driving wheel assembly 2, a body 3, an adjusting wing assembly 4, a pressure regulating assembly 5, a universal wheel 6, a control system and sensors;
[0042] to combine figure 2 , the rotating wing assembly 1 and the adjusting wing assembly 4 are installed on the body 3; the driving wheel assembly 2 is installed on the left and right sides of the body 3; the pressure regulating assembly 5 is installed on the bottom of the body 3 The buoyancy is adjusted by controlling the volume change of the main body 3; the universal wheel 6 is arranged at the end of the main body 3; the control system and various sensors are installed on the main body 3 for environmental acquisition and control of the multi-habitant robot.
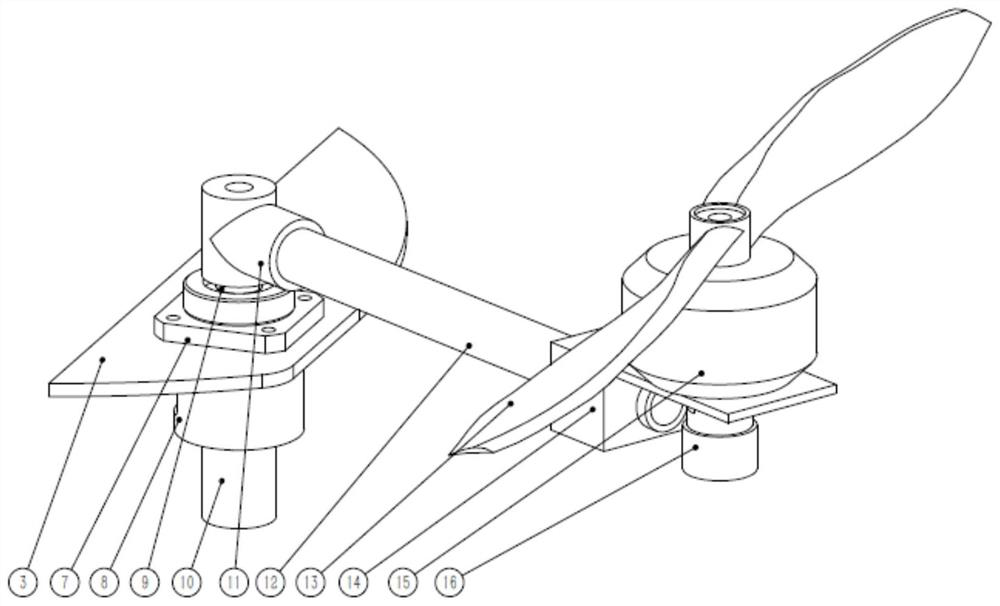
[0043] The rotary wing assembly 1 includes a first rotating seat 7, a first steering gear base 8, a blade rotating shaft 9, a first st...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More