

Underwater robot gravity center auxiliary adjusting system and control method
An underwater robot and adjustment system technology, applied in the directions of underwater ships, underwater operation equipment, motor vehicles, etc., can solve the problem of sacrificing the effective space of the underwater robot body, and achieve important practical engineering significance and theoretical value, space utilization. Reasonable and compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
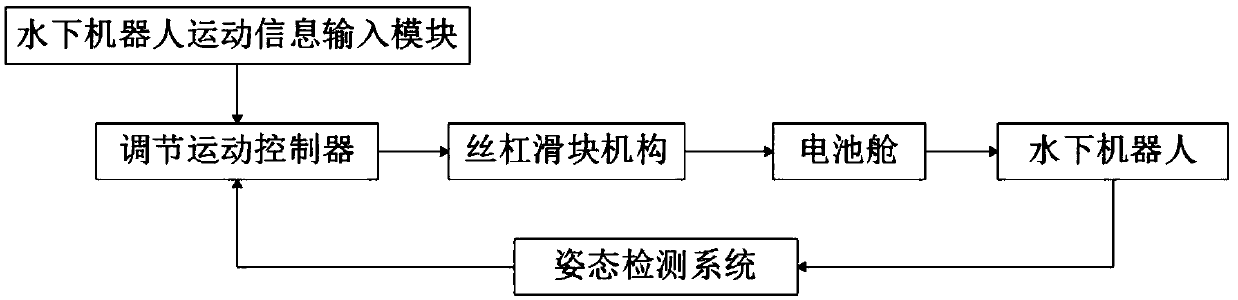
[0033] Implementation 1: If figure 1 As shown, the system is mainly composed of an attitude detection system, an adjustment motion controller, a screw slider mechanism, a battery compartment, and an underwater robot motion information input module: the attitude detection system is used to detect the attitude of the underwater robot body, especially the underwater robot The trim information of the underwater robot; the adjustment motion controller makes a comprehensive judgment based on the current pitch attitude information of the underwater robot, the motion control information of the underwater robot, and the motion control information of the underwater manipulator, controls the center of gravity auxiliary adjustment system, and adjusts the center of gravity of the underwater robot. Realize the control of the target attitude; the lead screw slider mechanism is the executive mechanism of the center of gravity auxiliary adjustment system, which is composed of a watertight motor...
Embodiment 2
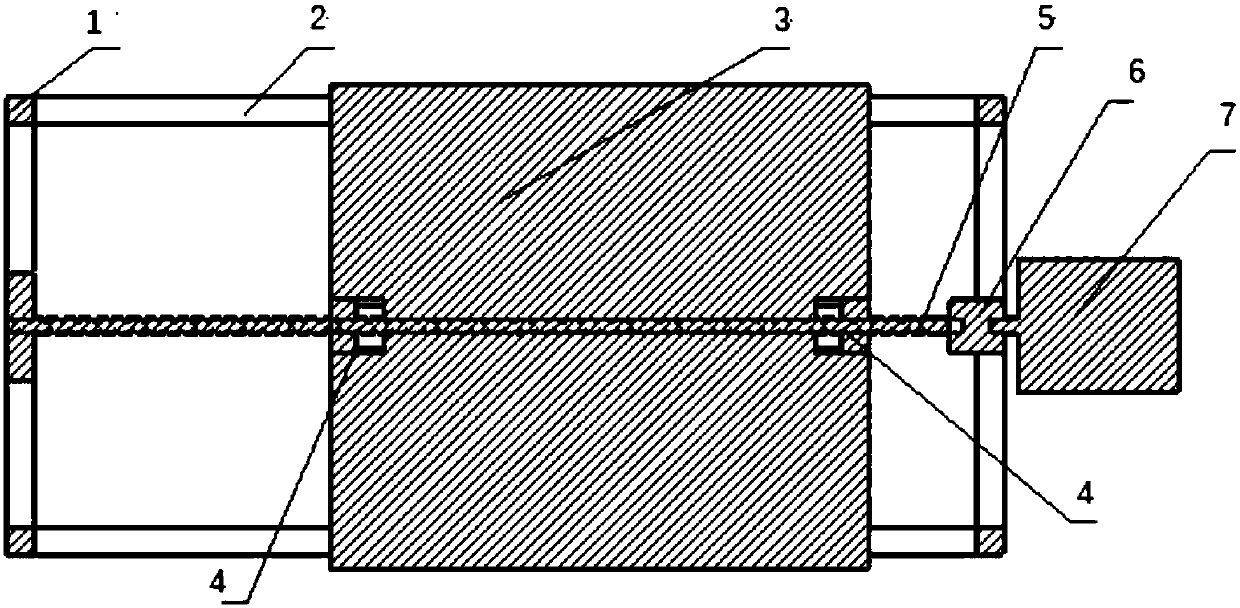
[0034] Implementation 2: If figure 2 As shown, the frame 1 plays an integral supporting role, the watertight motor 7 is connected with the lead screw 5 through the coupling 6, a slider 4 is respectively fixed at the front and rear positions of the middle part of the battery compartment 3, and the lead screw 5 is connected with the slider 4. The watertight motor 7 receives the command sent by the adjustment motion controller to drive the screw 5 to rotate, and the screw 5 drives the slider 4 to move back and forth, thereby realizing the forward and backward movement of the battery compartment 3 . Four guide rods 2 are placed at the four corners of the battery compartment 3 , and the four guide rods 2 play a role of supporting and guiding the battery compartment 3 .
Embodiment 3
[0035] Implementation 3: The kinematics and dynamics model of the pitch motion of the underwater robot with model parameter uncertainty and external disturbances are as follows:
[0036]
[0037] Where θ is the pitch angle, q is the pitch angular velocity, I y is the moment of inertia around the y-axis, and M q|q| is the hydrodynamic coefficient, τ M is the propeller thrust, Include model parameter uncertainty (the hydrodynamic parameters will be uncertain according to the environment, and the real value is difficult to measure) and external disturbances (waves, currents, etc.) f l .
[0038] For the convenience of controller derivation, the controller system is rewritten as follows:
[0039]
[0040] where x 1 =ψ,x 2 =r, ψ is heading angle, r is heading angular velocity, M is inertia item, I z is its own inertia, is the additional mass, D is the proportional coefficient of hydrodynamic parameters, N r|r| is the hydrodynamic parameter, u is the controller o...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More