

A visual navigation path recognition method for agricultural spraying robot
A robot vision and navigation path technology, applied in scene recognition, character and pattern recognition, instruments, etc., can solve the problems of not being able to directly use RGB color space and poor robustness, and achieve wide applicability, improve robustness, and simplify The effect of the algorithm step
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image



Examples
Embodiment Construction
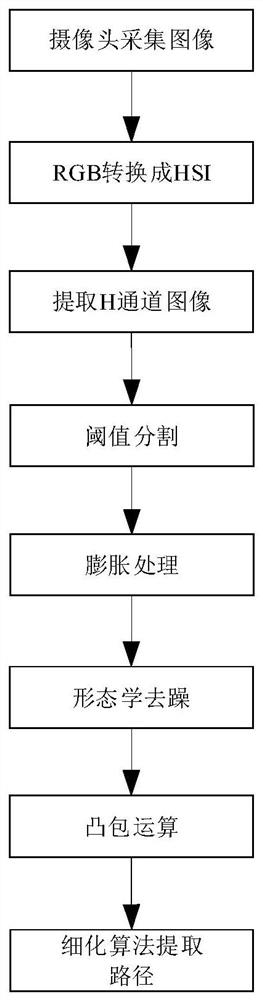
[0053] Such as figure 1 As shown, the flow chart of the path recognition method for the farmland spraying robot. The high ground clearance self-steering unmanned spraying locomotive is used as a platform, and the monocular camera is installed in the middle of the front of the locomotive. The height of the camera from the ground is 2.5m, and the viewing angle is 30°. The image is collected in real time by a camera model DH-IPC-HFW1025B, with a resolution of 960*720 pixels. Halcon software was used for image acquisition and processing.
[0054] Such as figure 2 As shown, the image is converted into the three-channel image rendering of the HSI color space. Since the images taken in the field are easily affected by light, the collected images cannot be directly thresholded. Therefore, it is necessary to select an appropriate color space to describe the color to reduce noise interference. The original image is directly converted from the RGB color space to the HSI color space...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More