

Vehicle stability index estimation method of based on depth learning
A deep learning and stability technology, applied in neural architecture, biological neural network models, etc., can solve the problems of filtering divergence, reduced result accuracy, inaccurate observation noise of the model, etc., and achieve small transient deviation of estimation, good estimation, and estimation Excellent precision
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0022] Below in conjunction with accompanying drawing, technical scheme of the present invention is described in further detail:
[0023] This invention may be embodied in many different forms and should not be construed as limited to the embodiments set forth herein. Rather, these embodiments are provided so that this disclosure will be thorough and complete, and will fully convey the scope of the invention to those skilled in the art. In the drawings, components are exaggerated for clarity.
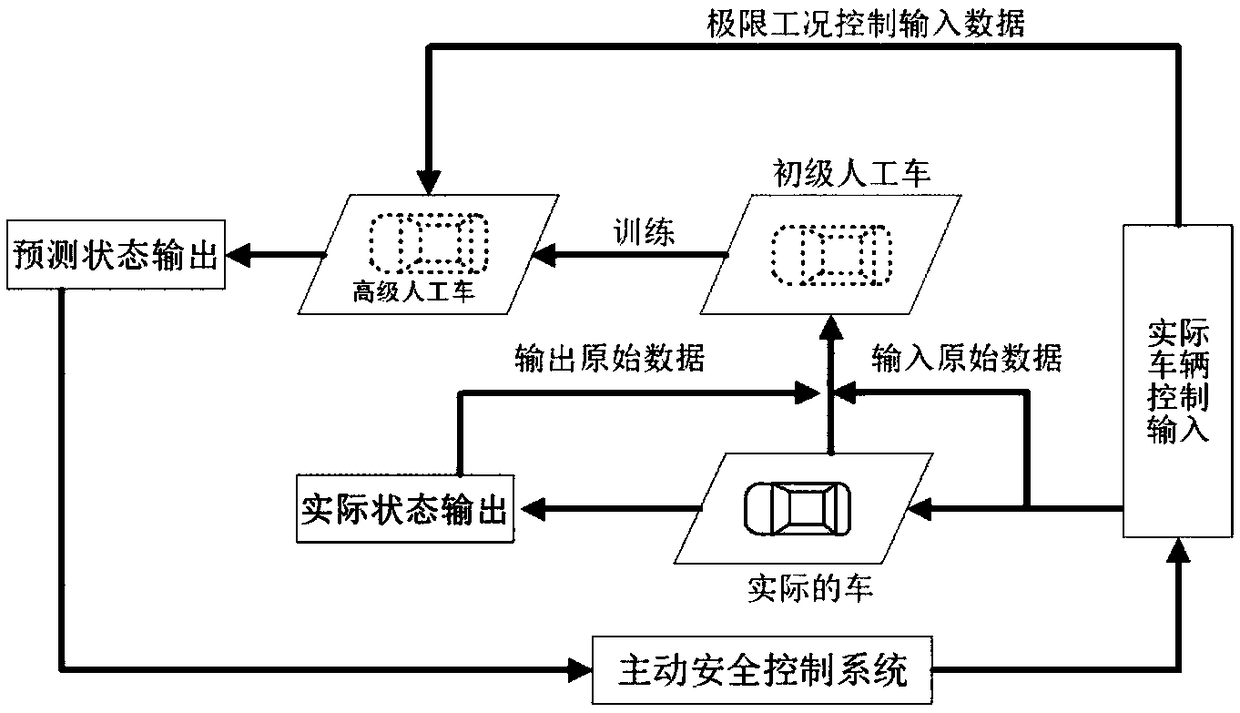
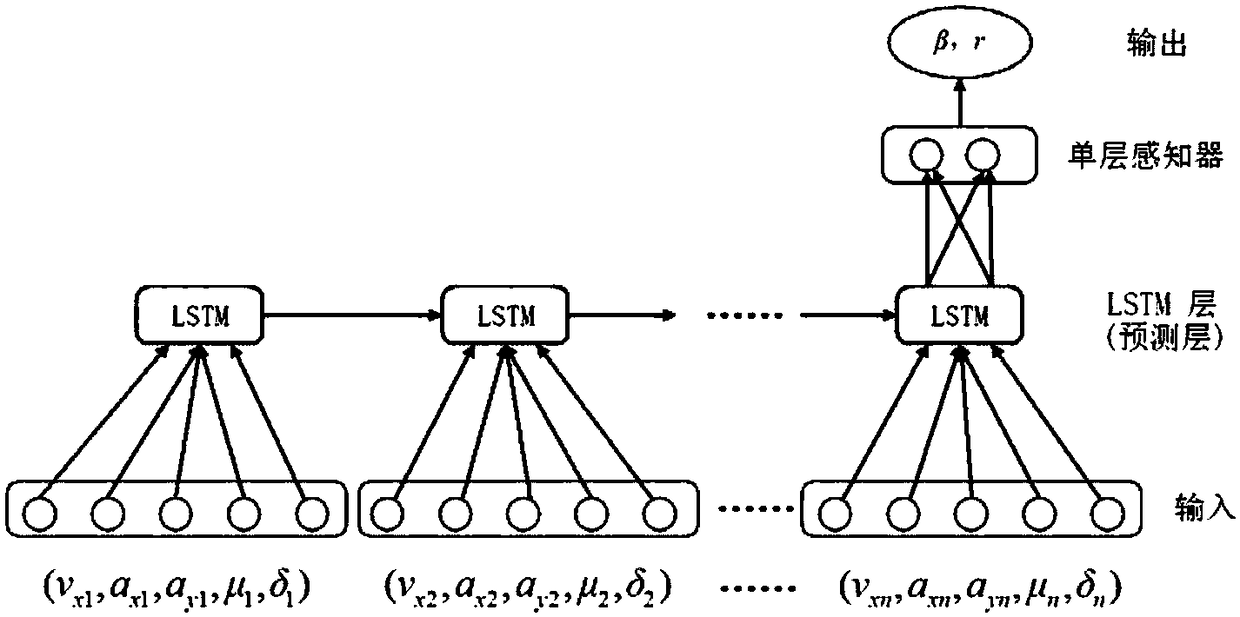
[0024] like figure 1 and figure 2 As shown, the present invention discloses a method for estimating vehicle stability index based on deep learning, comprising the following steps:
[0025] Step 1), set up the GPS system, gyroscope, front wheel angle sensor and yaw rate sensor on the vehicle, the GPS system is used to obtain the Doppler frequency shift based on the satellite signal to determine the speed of the vehicle, the gyroscope For detecting the longitudinal acceleration and l...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More