

Leap Motion-based finger symmetric rehabilitation error correction method
An error correction and finger technology, which is applied in the field of rehabilitation medical equipment, can solve the problems of increasing the time cost of the patient's rehabilitation, ineffective training of the finger on the diseased side, and long training time, so as to reduce the time cost of rehabilitation treatment, improve the effect of rehabilitation, increase the positive effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0040] Embodiment 1: In this embodiment, the error of the movement completed by the finger on the normal side and the finger on the lesion side is used for evaluation.
[0041] The bimanual symmetry rehabilitation error correction system of the present embodiment comprises the following steps:
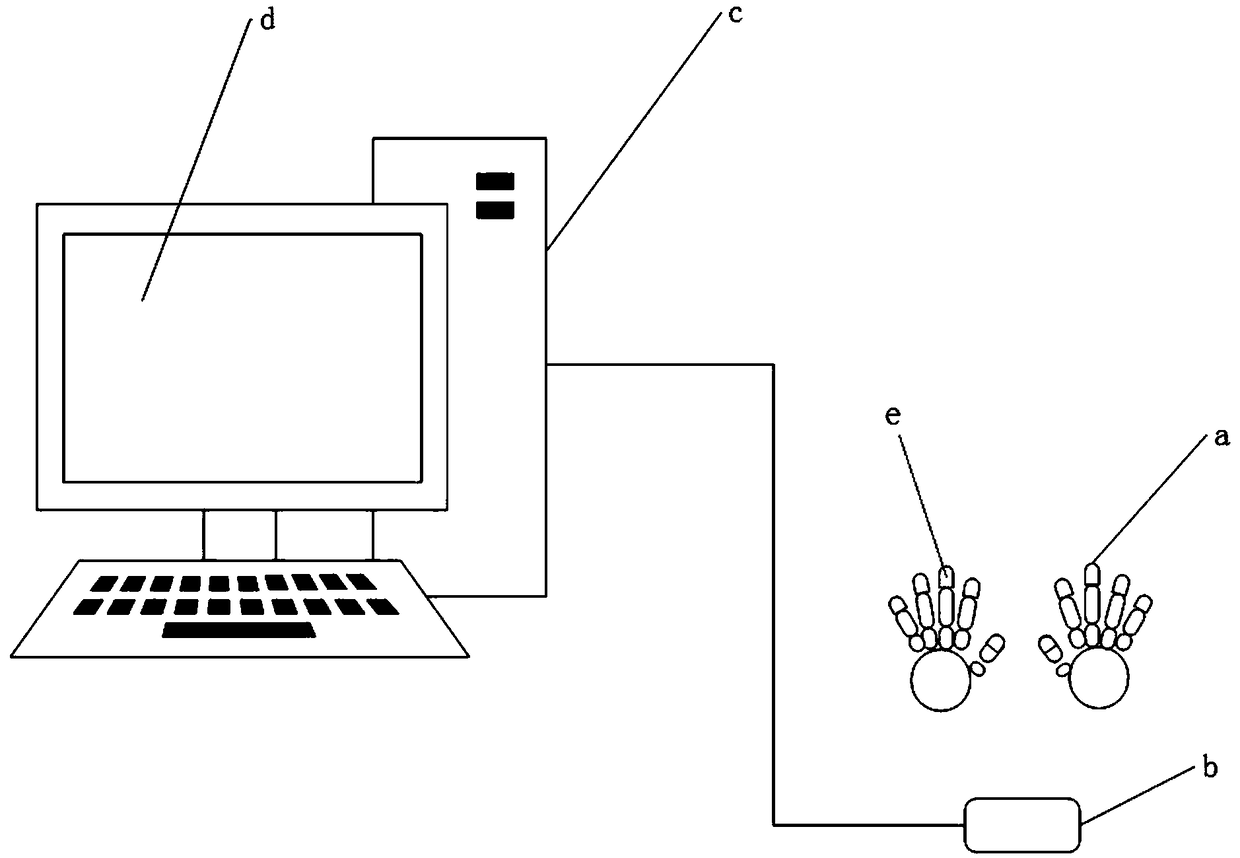
[0042] Step (1) predicts the behavior of the patient's normal hand e, including the coordinates F of the fingertips 0 and the angle θ of finger bending 1 , where, θ 1 is calculated from the difference between the angles between the two joints of the fingers;
[0043] Step (2) transfer the data obtained in step (1) to diseased hand a;
[0044] Step (3) Leap Motion transmits the bending angle of both hands and the coordinates of the fingertips to the host computer and displays them in real time, including the predicted value of normal hand behavior and the coordinates of the fingertips F 0 (x 0 ,y 0 ,z 0 ), the angle θ of finger bending 1 , the fingertip coordinates N of the finger...
Embodiment 2
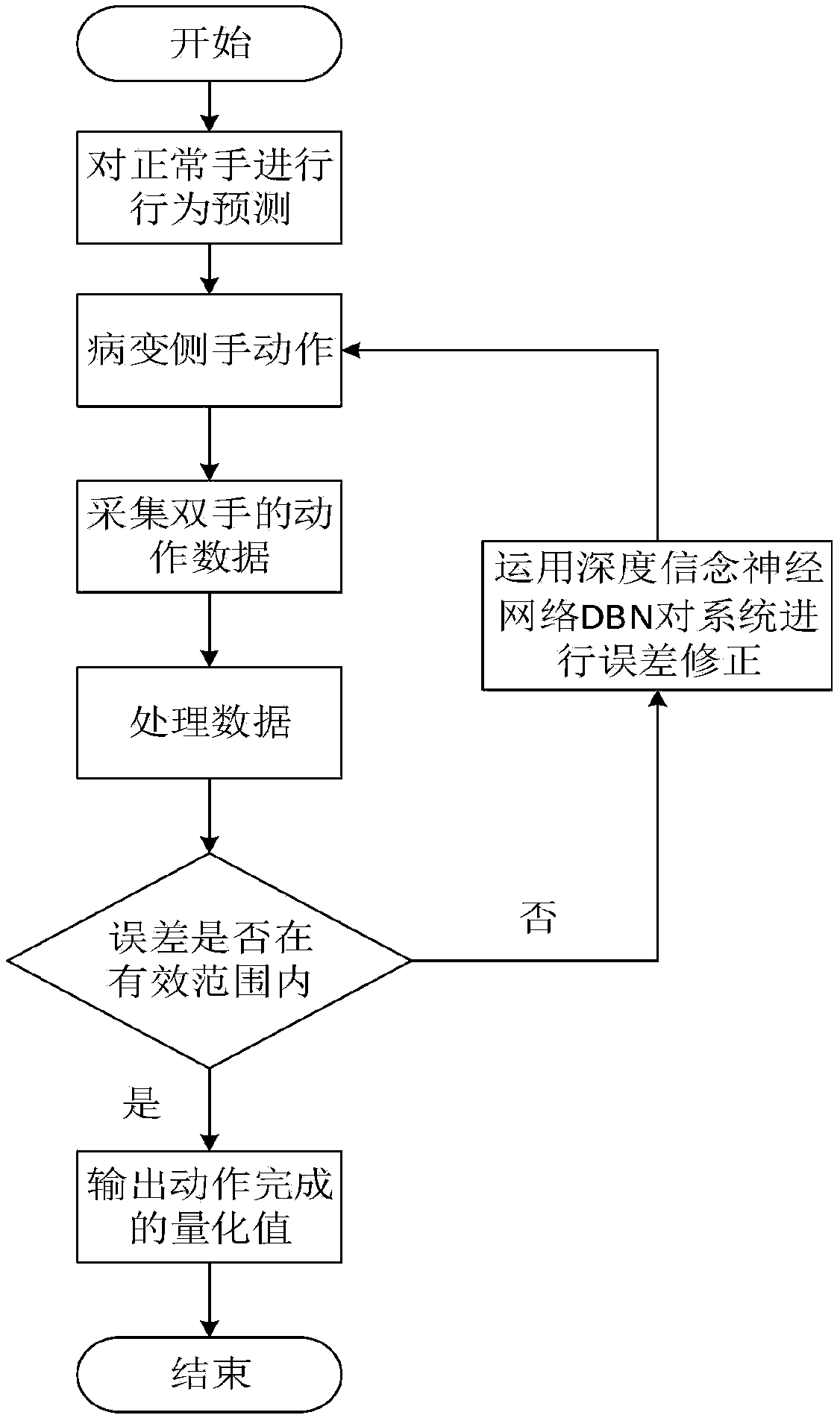
[0053] Embodiment 2: In the process of implementing Embodiment 1, the patient's hands will produce large errors when completing the action. Therefore, this embodiment uses the deep belief neural network DBN for system training, so that the error is within the effective range ;
[0054] See attached Figure 5 , the steps of this embodiment to the error correction training of the system are:
[0055] Step (1) First, input the data collected by Leap Motion and the calculated error as raw data into the bottom RBM visual layer v, and train the RBM of the first layer to achieve energy balance;
[0056] The joint configuration energy of the visible layer and the hidden layer in step (2) is:
[0057] E(v,h)=∑ i a i v i -∑ j b j h j -∑ i ∑ j w μ v i h j
[0058] Among them, v i and h j are the node states of the visible layer and the hidden layer respectively, a i and b j are the offsets corresponding to the visible layer and hidden layer nodes respectively, w μ is t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More