

Human-robot formation control method applicable to human-aimed navigation system
A technology of a navigation system and a control method, which is applied in two-dimensional position/channel control, non-electric variable control, control/regulation system and other directions, and can solve problems such as poor navigation performance and reduced friendly interaction.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0052] Below in conjunction with accompanying drawing and specific embodiment the present invention is described in further detail:
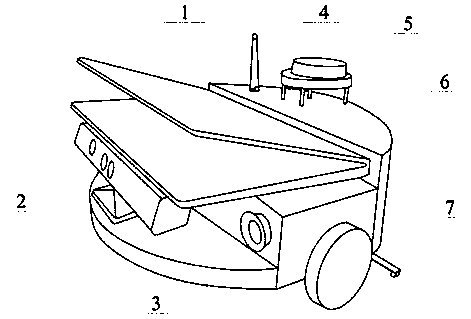
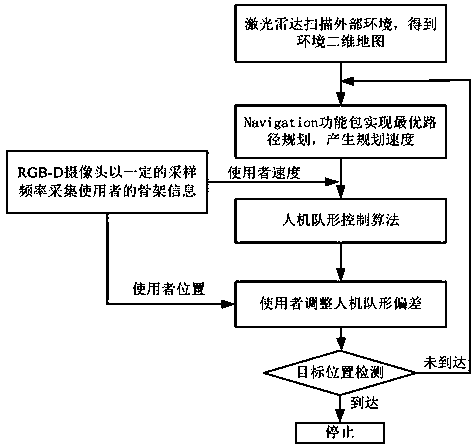
[0053] The invention provides a man-machine formation control method applied to a human navigation system, which fully considers the important position of the user in the system, adjusts the linear velocity and angular velocity of the robot according to the linear velocity of the user, and adjusts the linear velocity and angular velocity of the robot according to the distance between the user and the robot. It instructs the user to adjust his position so as to keep a certain relative distance and relative angle between the user and the robot, so as to form a human-machine formation control and achieve the effect of accurate human navigation.
[0054] Such as figure 1 As shown, the overall structural composition of the small mobile robot of the present invention is described. It is mainly composed of host computer PC terminal 1, RGB-D camera 2, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More