Method for detecting pose of mobile magnetic source
A pose and magnetic source technology, applied in the size/direction of the magnetic field, measuring device, electromagnetic measuring device, etc., can solve the problem of large errors in the detection results of the moving magnetic source, so as to facilitate analytical calculation and improve pose detection. Accuracy and efficiency improvement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
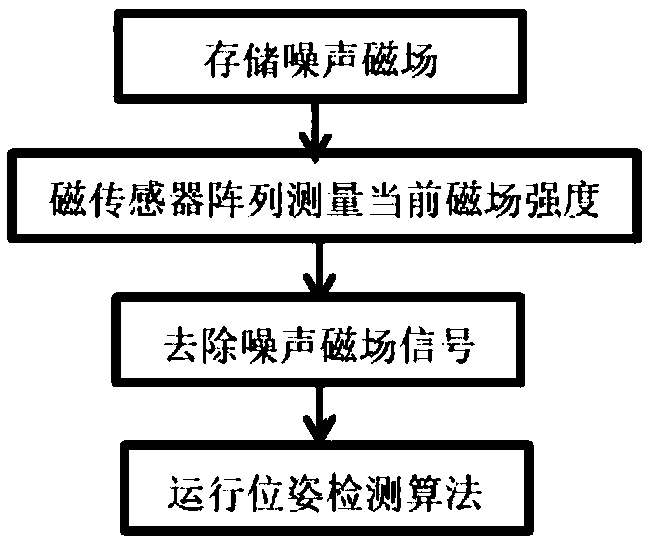
[0032] Step 1, storing the noise magnetic field.
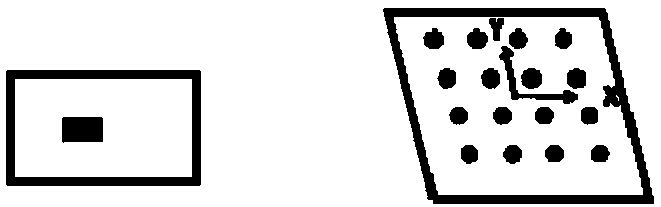
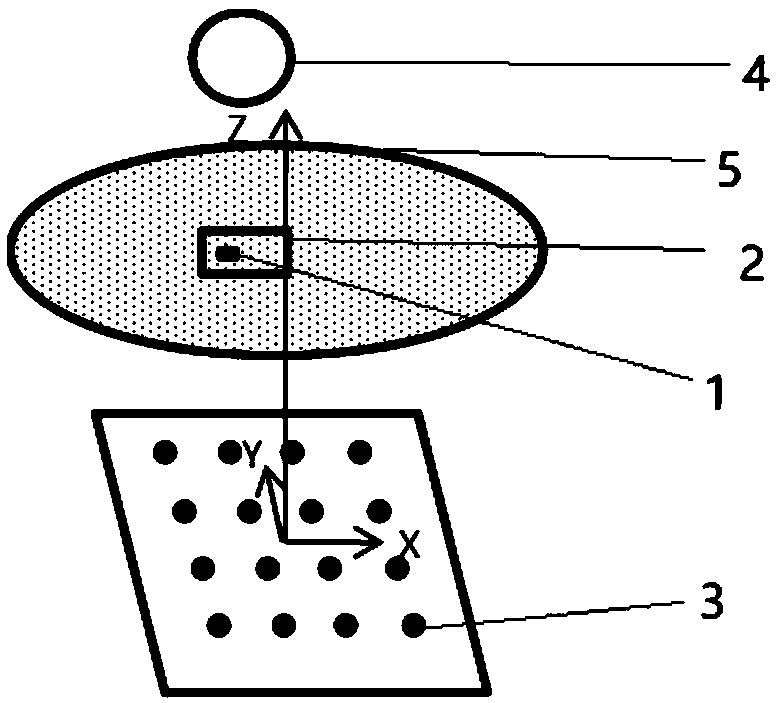
[0033] In the absence of the magnet 1 to be tested, move the driving magnet 4 so that the driving magnet 4 has different positions and attitudes relative to the magnetic sensor array, and store the magnetic field strengths at different positions and attitudes of the driving magnetic field as the magnetic field strength of the noise magnetic field. like Figure 4 As shown, the array coordinate system is established with the center of the magnetic sensor array as the origin, the plane where the magnetic sensor array is located is the XY plane, the direction perpendicular to the XY plane is the Z direction, and the coordinates of the center of the array are (0,0,0). Set the driving magnet 4 With respect to the fixed N poses of the magnetic sensor array, N≥1, place the driving magnet 4 in any position, stop moving, and maintain the pose. Record the coordinates of these N poses in the array coordinate system, set as (x 1n ,y 1n ...
Embodiment 2
[0042] Example two such as Figure 5 As shown, the difference from Embodiment 1 is that when storing the noise magnetic field in step 1, the pose density of the driving magnet 4 is different, and it is necessary to ensure that the magnetic field strength is between x, y, The difference in each direction of z is less than the specified threshold, and this density can be obtained by experiment. The selection of the specified threshold is related to the final required positioning accuracy. When the position accuracy of the required detection result is within 10mm and the attitude accuracy is within 5 degrees, the magnetic field difference between any adjacent storage position and attitude in the x, y, and z directions is not greater than 100-300mGs.
[0043] In step 2, the difference is that if the current pose of the driving magnet 4 has not been stored in advance, then two pre-stored poses that are closer to the current pose of the drive magnet than other stored poses are judg...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More